
§ 25. ПОЛИТИЧЕСКОЕ УСТРОЙСТВО РУСИ ПРИ ИВАНЕ III И ВАСИЛИИ III
§ 25. ПОЛИТИЧЕСКОЕ УСТРОЙСТВО РУСИ ПРИ ИВАНЕ III И ВАСИЛИИ III
1. Реформы центрального управления
Причины изменений в государственном управлении. По мере объединения вокруг Москвы шло становление новых органов власти. Старая удельная система уже не годилась, так как исчезли самостоятельные удельные князья, их войско, суд. Реформы Ивана III заложили основы централизации Руси, хотя завершился этот процесс только в XVII в.
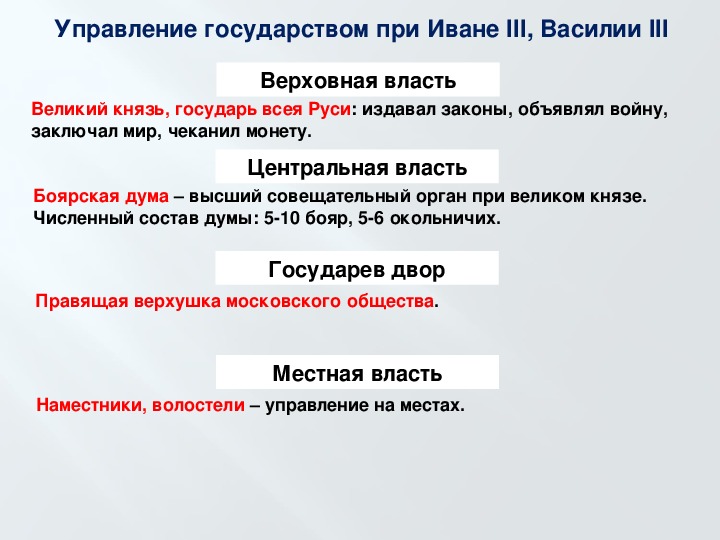
«Государь всея Руси». Главой Московского государства был великий князь, «государь всея Руси». (Иван III объявил своим соправителем сына от первого брака Ивана Молодого, однако этот решительный и умный князь умер раньше отца, в 1490 г.) Новый титул «государь» подчеркивал, что московский монарх возвышается над своими подданными (боярами, служилыми людьми, крестьянами и т. д.), как хозяин над холопами.
В 1472 г. Иван III вступил во второй брак – с племянницей последнего византийского императора Софьей Палеолог.
Женитьба Ивана III. Летописная миниатюра
Софья Палеолог. Реконструкция
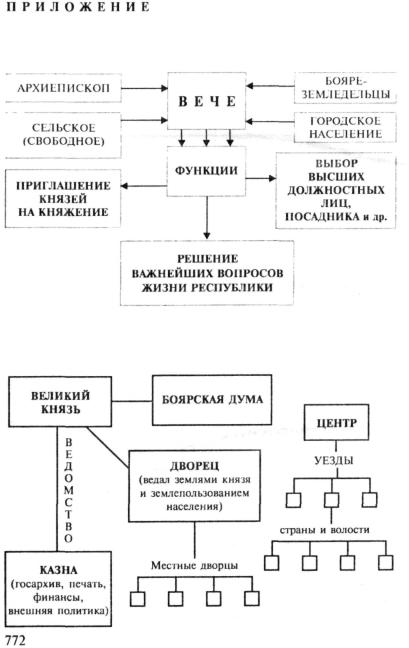
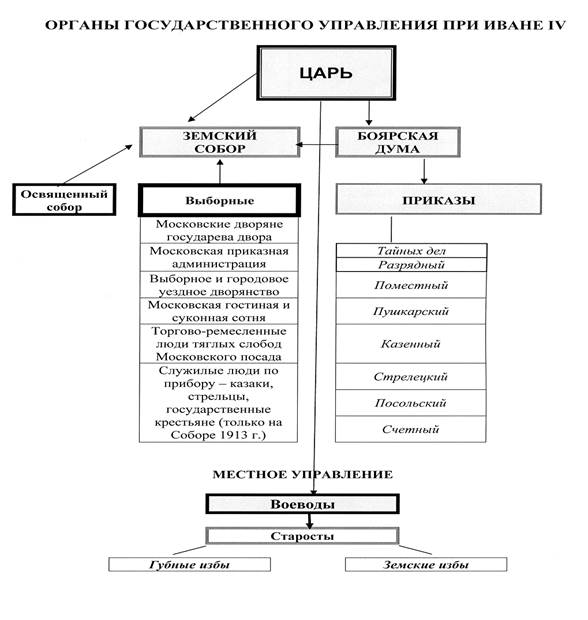
Центральные государственные органы. По важнейшим делам государь всея Руси советовался с боярами, входившими в Боярскую думу. Дума XV в. была невелика: 6 – 12 думных бояр (высший чин), столько же окольничих (более низкий чин). Позже появились еще думные дворяне
и думные дьяки.Важнейшим органом управления после Думы была Казна. В ней хранились государственные средства – серебряные монеты, золотые украшения, дорогая одежда, меха, драгоценные камни. В Казне находились также печати и государственный архив. Казна контролировала сбор налогов и вела внешнюю политику. Руководил казной боярин казначей.
В Казне находились также печати и государственный архив. Казна контролировала сбор налогов и вела внешнюю политику. Руководил казной боярин казначей.
Из органов великокняжеского вотчинного управления выросла система дворцов. Так, хозяйством великого князя ведал Государев дворец, а Новгородом управлял Новгородский дворец, Тверью – Тверской. Возглавлялись дворцы боярами – дворецкими. Им помогали дьяки, которые происходили из незнатных людей, начавших службу писцами – подьячими.
Печать Ивана III
Для любознательных
Вопрос о наследнике. Когда в 1502 г. Иван захотел передать престол своему старшему сыну от Софьи Палеолог Василию, а не внуку Дмитрию Ивановичу, которого он сам в 1498 г. «венчал» на престол, «государь всея Руси» ссылался не на закон или обычай, а лишь на собственную волю: «Чи не волен яз (я), князь великий, в своих детях и в своем княжении? Кому хочу, тому дам княжение».
2. Территориальное деление и местные органы власти
Территория Руси делилась на уезды. Они повторяли своими очертаниями границы прежних уделов. Новгородская земля, как и в старину, делилась на пятины. Уезды включали в себя несколько волостей и станов. Размеры уездов были различны.
Они повторяли своими очертаниями границы прежних уделов. Новгородская земля, как и в старину, делилась на пятины. Уезды включали в себя несколько волостей и станов. Размеры уездов были различны.
Для управления уездами Москва посылала наместников из бояр. Волостями и станами руководили волостели, обычно незнатные служилые люди.
Наместники жили за счет кормлений, т. е. поборов с населения в свою пользу. Кормления воспринимались как плата за прежние заслуги княжеских людей. Контролировать деятельность наместников из столицы было трудно. Родилась даже поговорка о местных властях: «До Бога – высоко, до царя – далеко, я – близко, кланяйся мне низко!»
Помимо уездов, внутри Московского государства существовали уделы, правителями которых являлись братья «государя всея Руси». Но размеры уделов были небольшие. Удельные князья не могли чеканить свою монету, судить за убийство. Если у них не было сыновей, то после их смерти удел переходил к великому князю.
3. Местничество, право
Во времена Ивана III зародилась система местничества. Бояре получали должности в соответствии со знатностью своего рода и сроком службы предков московскому князю. Это позволило «уравнять» старинных московских бояр (Салтыковых, Шереметевых, Романовых и др.) с хлынувшими в столицу потомками удельных князей Рюриковичей и Гедиминовичей (князья Курбские, Шуйские и др.). Бояре, в конце концов, должны были получить те же должности, что занимали их отцы и деды. Должности (места) записывали в книги.
Шапка Мономаха
Юрьев день. Художник С. Иванов
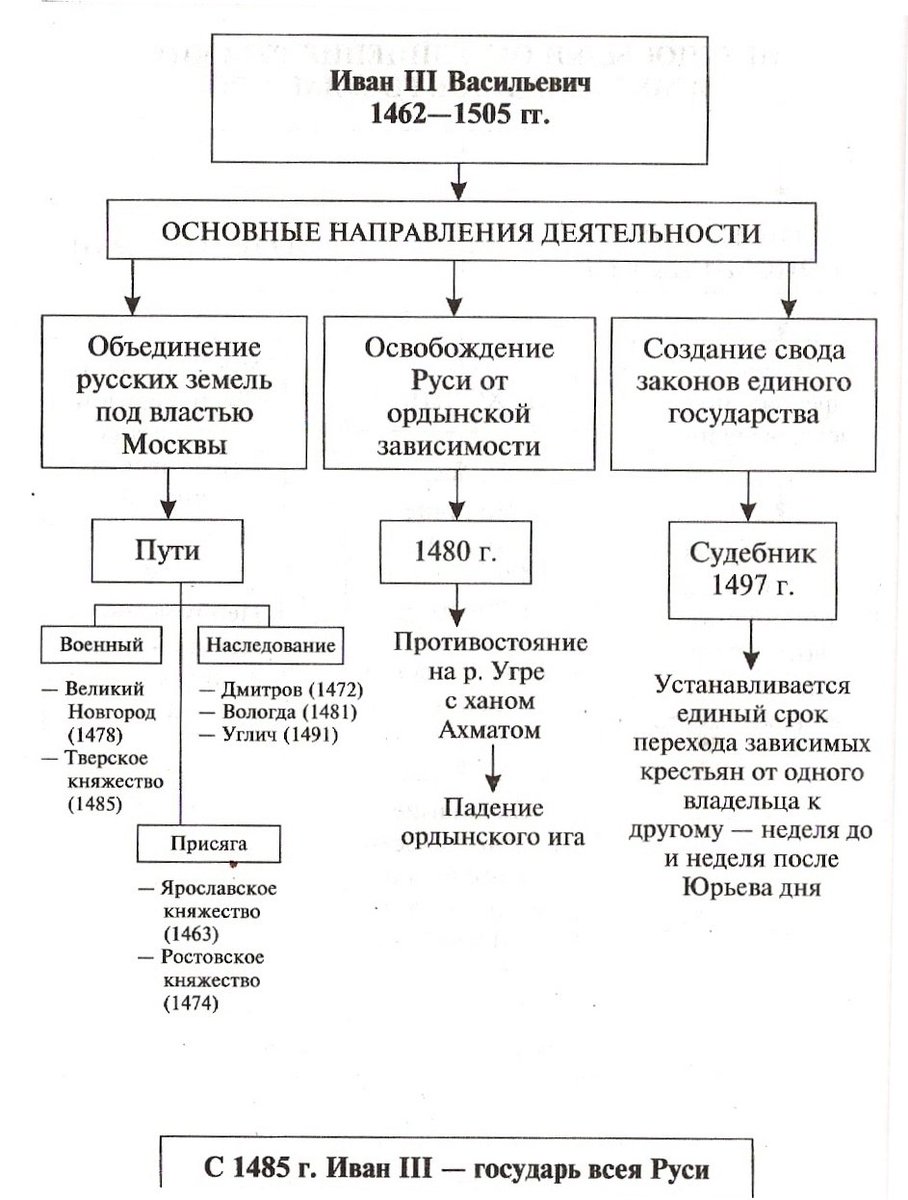
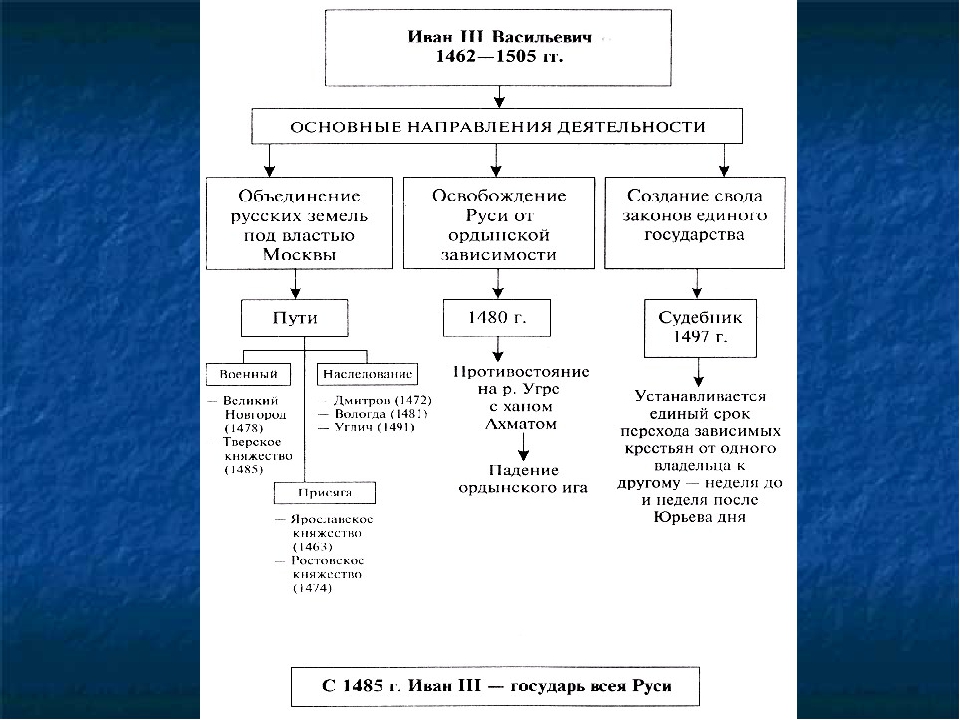
К концу XV в. Русская Правда, на основе которой ранее вели судебные дела, устарела. Единому государству нужен был новый закон. По велению Ивана III в 1497 г. был составлен общерусский Судебник (свод законов).
Судебник вводил единый для всей страны срок перехода зависимых крестьян от одного владельца к другому – неделя до и неделя после Юрьева дня (26 ноября). Крестьяне могли уйти от вотчинника, заплатив пожилое – плату за проживание на земле господина. Некоторые ученые видят в этом шаг к закрепощению крестьян, другие – регламентацию крестьянских переходов в масштабах всей страны.
Крестьяне могли уйти от вотчинника, заплатив пожилое – плату за проживание на земле господина. Некоторые ученые видят в этом шаг к закрепощению крестьян, другие – регламентацию крестьянских переходов в масштабах всей страны.
1. Почему в княжение Ивана Великого потребовались изменения в государственном центральном и местном управлении?
2. Имела ли какое-либо политическое значение женитьба Ивана III на Софье Палеолог?
3. Составьте в тетради схему «Органы центральной и местной власти на Руси во второй половине XV в.».
4. Можно ли считать Ивана III дальновидным правителем? Свое мнение подкрепите анализом фактов.
1497 г. – Судебник Ивана III.
Данный текст является ознакомительным фрагментом.
Продолжение на ЛитРес| Наименование структурного подразделения (органа управления) | ФИО руководителя структурного подразделения | Должность руководителя структурного подразделения | Место нахождения структурного подразделения | Адрес официального сайта структурного подразделения | Адрес электронной почты структурного подразделения | Ссылка на копию положения структурного подразделения |
| Попечительский совет | Вайно Антон Эдуардович | Председатель попечительского совета | г.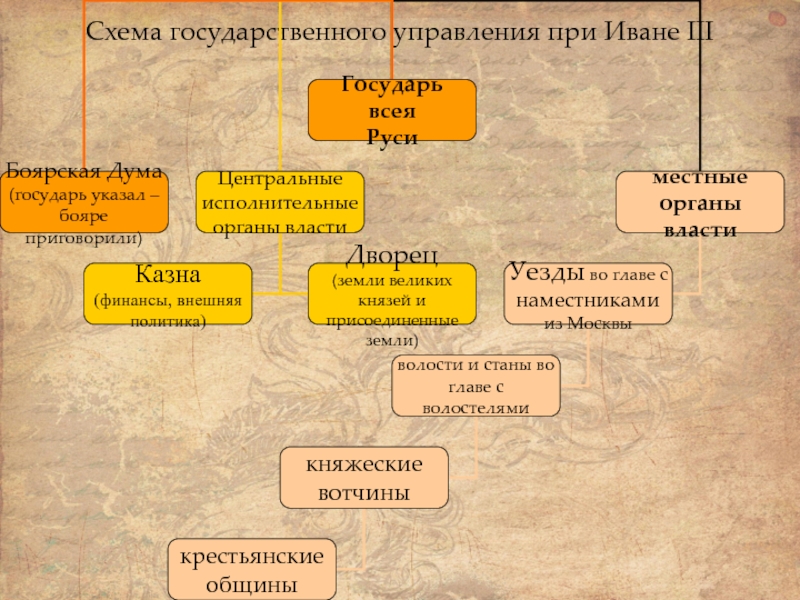 Москва, проспект Вернадского, д.82, с.1 (5 кор. РАНХиГС), 5 этаж, ауд.523 Москва, проспект Вернадского, д.82, с.1 (5 кор. РАНХиГС), 5 этаж, ауд.523 | – | – | Положение о Попечительском совете |
| Международный консультационный совет | – | – | г.Москва, проспект Вернадского, д.82, с.1 (5 кор. РАНХиГС), 4 этаж, ауд.414 | – | – | – |
| Ректорат (орган управления) | Мау Владимир Александрович | ректор | г.Москва, проспект Вернадского, д.82, с.1 (5 кор. РАНХиГС), 4 этаж, ауд.414 | – | – | Положение о ректорате |
| Ученый совет | Мау Владимир Александрович | председатель Ученого совета | г.Москва, проспект Вернадского, д.82, с.1 (5 кор. РАНХиГС), 5 этаж, Зал ученого совета | – | – | Положение об Ученом совете (выдержки из Устава Академии) |
| Институт бизнеса и делового администрирования | Мясоедов Сергей Павлович | директор | г. Москва, проспект Вернадского, д.82, с.1 (5 кор. РАНХиГС), офис 219 Москва, проспект Вернадского, д.82, с.1 (5 кор. РАНХиГС), офис 219 | http://ibda.ranepa.ru/ | [email protected] | Положение |
| Кафедра количественных методов в менеджменте | Чеканский Александр Николаевич | ИО заведующего кафедрой | г.Москва, проспект Вернадского, д.82, с.1 (5 кор. РАНХиГС), кабинет 219/2 | – | – | |
| Кафедра гуманитарных наук, деловой этики и социальной ответственности | Колесникова Ирина Владимировна | заведующая кафедрой | г.Москва, проспект Вернадского, д.82, с.3 (2 кор. РАНХиГС), кабинет 248 | – | [email protected] | – |
| Кафедра иностранных языков | Новикова Елена Николаевна | заведующая кафедрой | г.Москва, проспект Вернадского, д.82, с3 (2 кор. РАНХиГС), кабинет 246 | – | novikova-en@ibda. ranepa.ru ranepa.ru | – |
| Кафедра деловых коммуникаций и английского языка | Янковская Наталья Борисовна | заведующая кафедрой | г.Москва, проспект Вернадского, д.82, с.3 (2 кор. РАНХиГС), кабинет 241 | [email protected] | — | |
| Кафедра европейских языков | Березовская Татьяна Евгеньевна | заведующая кафедрой | г.Москва, проспект Вернадского, д.82, с.3 (2 кор. РАНХиГС), кабинет 211 | – | [email protected] | – |
| Кафедра восточных языков | Крюкова Екатерина Николаевна | заведующая кафедрой | г.Москва, проспект Вернадского, д.82, с.3 (2 кор. РАНХиГС), кабинет 250 | — | [email protected] | — |
| Кафедра инновационных технологий в государственной сфере и бизнесе | Стрижов Станислав Алексеевич | ИО заведующего кафедрой | г. | – | [email protected] | – |
| Кафедра менеждмента | Гапоненко Александр Лукич | заведующий кафедрой | г.Москва, проспект Вернадского, д.84, кор.2 (8 кор. РАНХиГС), кабинет 730 | – | [email protected] | – |
| Кафедра мировой экономики и международных отношений | Тимонина Ирина Львовна | ИО заведующего кафедрой | г.Москва, проспект Вернадского, д.82, с.3 (2 кор. РАНХиГС), кабинет 243 | – | [email protected] | – |
| Институт государственной службы и управления | Корчагин Руслан Николаевич | и.о. директора | г. Москва, проспект Вернадского, д.84 (1 кор. РАНХиГС), офис 3329 | http://igsu. ranepa.ru/ ranepa.ru/ | [email protected] | Положение |
| Кафедра государственного и муниципального управления | Ботнев Владимир Константинович | заведующий кафедрой | г.Москва, проспект Вернадского, д.84 | – | [email protected] | – |
| Кафедра государствоведения | — | — | г.Москва, проспект Вернадского, д.84 | – | [email protected] | – |
| Кафедра правового регулирования экономики и финансов | Черникова Елена Вадимовна | заведующая кафедрой | г.Москва, проспект Вернадского, д.84 | – | [email protected] | – |
| Кафедра государственно-правовых дисциплин | – | – | г.Москва, проспект Вернадского, д.84, с. 2 (6 кор. РАНХиГС), кабинет 3070 2 (6 кор. РАНХиГС), кабинет 3070 | – | [email protected] | – |
| Кафедра правового обеспечения рыночной экономики | – | заведующий кафедрой | г.Москва, проспект Вернадского, д.84, с.2 (6 кор. РАНХиГС), кабинет 2032, 2033 | – | [email protected] | – |
| Кафедра парламентаризма и межпарламентского сотрудничества | Бакушев Валерий Владимирович | заведующий кафедрой | г.Москва, проспект Вернадского, д.84, с.2 (6 кор. РАНХиГС), кабинет 2020 | – | [email protected] | – |
| Кафедра государственной службы и кадровой политики | г.Москва, проспект Вернадского, д.84, с.2 (6 кор. РАНХиГС), кабинет 3014 | – | [email protected] | – | ||
| Кафедра правового обеспечения государственной и муниципальной службы | Киреева Елена Юрьевна | заведующая кафедрой | г. Москва, проспект Вернадского, д.84 Москва, проспект Вернадского, д.84 | – | [email protected] | – |
| Кафедра управления персоналом | Обухова Лариса Александровна | ИО заведующего кафедрой | г.Москва, проспект Вернадского, д.84 | – | [email protected] | – |
| Кафедра организационного проектирования систем управления | Литвинцева Елена Ананьевна | заведующий кафедрой | г.Москва, проспект Вернадского, д.84 | – | [email protected] | – |
| Кафедра государственного регулирования экономики | Кушлин Валерий Иванович | заведующий кафедрой | г.Москва, проспект Вернадского, д.84 | – | [email protected] | – |
| Кафедра экономики и финансов общественного сектора | Быстряков Александр Яковлевич | заведующий кафедрой | г. Москва, проспект Вернадского, д.84 Москва, проспект Вернадского, д.84 | – | [email protected] | – |
| Кафедра теории и практики государственного контроля | Горегляд Валерий Павлович | заведующий кафедрой | г.Москва, проспект Вернадского, д.84 | – | [email protected] | – |
| Кафедра регионального управления | Беляева Ольга Игоревна | ИО заведующего кафедрой | г.Москва, проспект Вернадского, д.84 | – | [email protected] | – |
| Кафедра труда и социальной политики | Калашников Сергей Вячеславович | заведующий кафедрой | г.Москва, проспект Вернадского, д.84, с.2 (6 кор. РАНХиГС), кабинет 2036 | – | tsp-igsu@ranepa.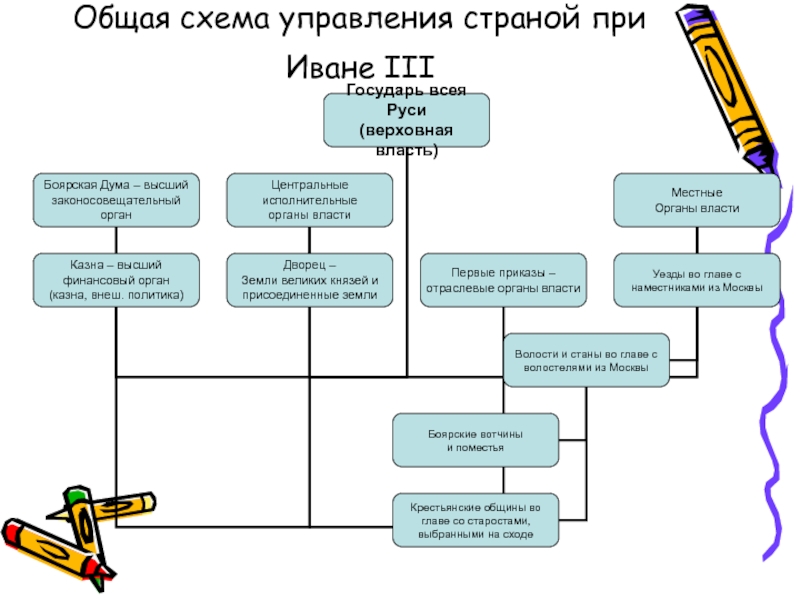 ru ru | – |
| Кафедра управления природопользованием и охраны окружающей среды | Краснощеков Валентин Николаевич | заведующий кафедрой | г.Москва, проспект Вернадского, д.84 | – | [email protected] | – |
| Кафедра управления проектами и программами | Сафонов Максим Сергеевич | И.О. заведующего кафедрой | г.Москва, проспект Вернадского, д.84, с.2 (6 кор. РАНХиГС), кабинет 2128 | – | [email protected] | – |
| Кафедра антикризисного регулирования и управления рисками | Ивлева Галина Юрьевна | заведующий кафедрой | г.Москва, проспект Вернадского, д.84, с.2 (6 кор. РАНХиГС), кабинет 3120 | – | [email protected] | – |
| Кафедра информатики и прикладной математики | Корчагин Руслан Николаевич | заведующий кафедрой | г. Москва, проспект Вернадского, д.84, с.2 (6 кор. РАНХиГС), кабинет 2005 Москва, проспект Вернадского, д.84, с.2 (6 кор. РАНХиГС), кабинет 2005 | – | [email protected] | – |
| Кафедра зарубежного регионоведения и международного сотрудничества | Комлева Валентина Вячеславовна | заведующий кафедрой | г.Москва, проспект Вернадского, д.84 | – | [email protected] | – |
| Кафедра государственно-конфессиональных отношений | Кравчук Вероника Владимировна | И.О. заведующего кафедрой | г.Москва, проспект Вернадского, д.84 | – | [email protected] | – |
| Кафедра языковой подготовки кадров государственного управления | Белякова Ирина Геннадиевна | заведующий кафедрой | г.Москва, проспект Вернадского, д.84, с.2 (6 кор.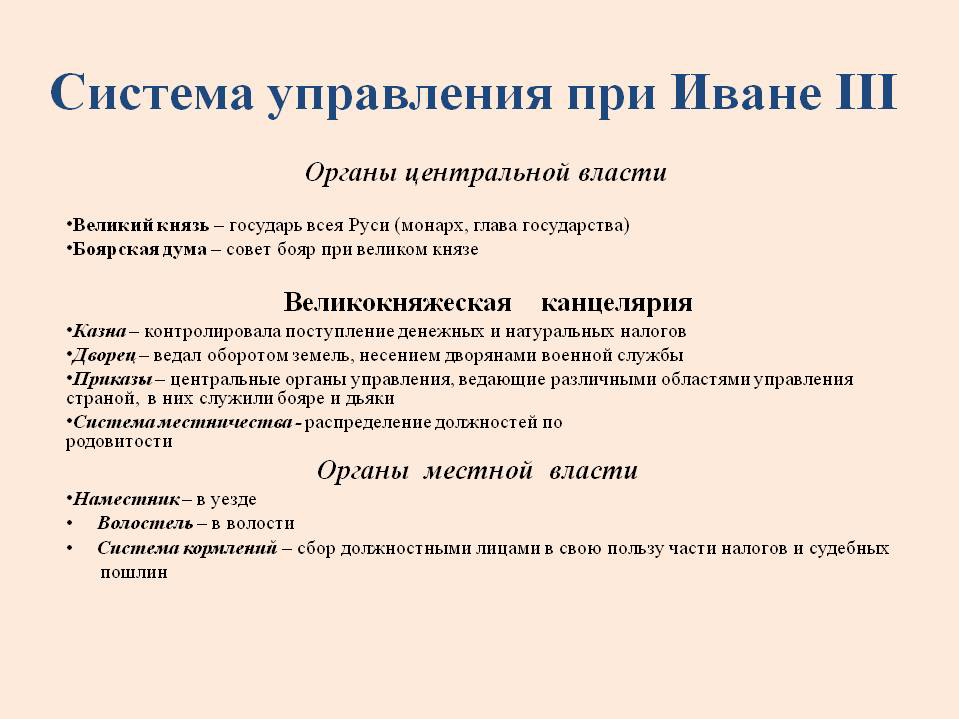 РАНХиГС), кабинет 3117 РАНХиГС), кабинет 3117 | – | [email protected] | – |
| Кафедра национальных и федеративных отношений | – | – | г.Москва, проспект Вернадского, д.84, с.2 (6 кор. РАНХиГС), кабинет 2069 | – | [email protected] | – |
| Кафедра ЮНЕСКО | Егоров Владимир Константинович | заведующий кафедрой | г.Москва, проспект Вернадского, д.84 | – | [email protected] | – |
| Кафедра управления информационными процессами | Силкин Владимир Владимирович | заведующий кафедрой | г.Москва, проспект Вернадского, д.84, с.2 (6 кор. РАНХиГС), кабинет 3006 | – | [email protected] | – |
| Кафедра политической и деловой журналистики | Новиков-Ланской Андрей Анатольевич | заведующий кафедрой | г. Москва, проспект Вернадского, д.84, с.2 (6 кор. РАНХиГС), кабинет 3006 Москва, проспект Вернадского, д.84, с.2 (6 кор. РАНХиГС), кабинет 3006 | – | [email protected] | – |
| Кафедра общественных связей и медиаполитики | Шарков Феликс Изосимович | заведующий кафедрой | г.Москва, проспект Вернадского, д.84, с.2 (6 кор. РАНХиГС), кабинет 2135 | – | [email protected] | – |
| Институт общественных наук | Гринцер Николай Павлович | и.о. директора | г.Москва, проспект Вернадского, д.82, с.3 (2 кор. РАНХиГС), офис 256 | http://ion.ranepa.ru/ | [email protected] | Положение |
| Кафедра акмеологии и психологии профессиональной деятельности | Анатолий Алексеевич Деркач | заведующий кафедрой | г.Москва, проспект Вернадского, д.84, кор.2 (8 кор. РАНХиГС), кабинет 500 | – | acmeolog@mail. ru ru | – |
| Кафедра всеобщей истории | Игнатченко Игорь Владиславович | заведующий кафедрой | г.Москва, проспект Вернадского, д.84, кор.3 (9 кор. РАНХиГС), кабинет 2400 | – | [email protected] | – |
| Кафедра государственного регулирования экономики | Климанов Владимир Викторович | заведующий кафедрой | г.Москва, проспект Вернадского, д.84, кор.3 (9 кор. РАНХиГС), кабинет 2604 | – | [email protected] | – |
| Кафедра государственного управления | Балобанов Александр Евгеньевич | заведующий кафедрой | г.Москва, проспект Вернадского, д.84, кор.3 (9 кор. РАНХиГС), кабинет 2605 | – | [email protected] | – |
| Кафедра гуманитарных дисциплин | Смолькин Антон Александрович | зам. заведующий кафедрой заведующий кафедрой | г.Москва, проспект Вернадского, д.84, кор.3 (9 кор. РАНХиГС), кабинет 2605 | – | [email protected] | – |
| Кафедра дизайна | Серов Сергей Иванович | заведующий кафедрой | Пречистенская набережная, д.11, с.1, кабинет 306 | – | [email protected] | – |
| Кафедра иностранных языков | Круглякова Виктория Алексеевна | – | Товарищеский пер. д.19, ком.214 | – | [email protected] | – |
| Кафедра интегрированных коммуникаций | Захарова Мария Васильевна | – | г.Москва, проспект Вернадского, д.84, кор.3 (9 кор. РАНХиГС), кабинет 2604 | – | [email protected] | – |
| Кафедра истории российской государственности | Малхозова Фатима Викторовна | – | г. Москва, проспект Вернадского, д.84, кор.3 (9 кор. РАНХиГС), кабинет 2400 Москва, проспект Вернадского, д.84, кор.3 (9 кор. РАНХиГС), кабинет 2400 | – | [email protected] | – |
| Кафедра истории экономики | Кончаков Роман Борисович | – | г.Москва, проспект Вернадского, д.84, кор.3 (9 кор. РАНХиГС), кабинет 2400 | – | [email protected] | – |
| Кафедра культурологии и социальной коммуникации | Неклюдова Мария Сергеевна | – | г.Москва, проспект Вернадского, д.84, кор.3 (9 кор. РАНХиГС), кабинет 2404 | – | [email protected] | – |
| Кафедра общей психологии | Спиридонов Владимир Феликсович | – | г.Москва, проспект Вернадского, д.84, кор.3 (9 кор. РАНХиГС), кабинет 2402 | – | ion@ranepa. ru ru | – |
| Кафедра теории и практики медиакоммуникаций | Лученко Ксения Валерьевна | – | г.Москва, Пречистенская наб., д.11, Медиалофт | – | [email protected] | – |
| Кафедра политологии и политического управления | Шабров Олег Федорович | – | г.Москва, проспект Вернадского, д.84, кор.3 (9 кор. РАНХиГС), кабинет 2504 | – | [email protected] | – |
| Кафедра информационных технологий | Голосов Павел Евгеньевич | – | г.Москва, проспект Вернадского, д.84, кор.3 (9 кор. РАНХиГС), кабинет 2602 | – | [email protected] | – |
| Кафедра социологии управления | Савин Алексей Эдуардович | – | г.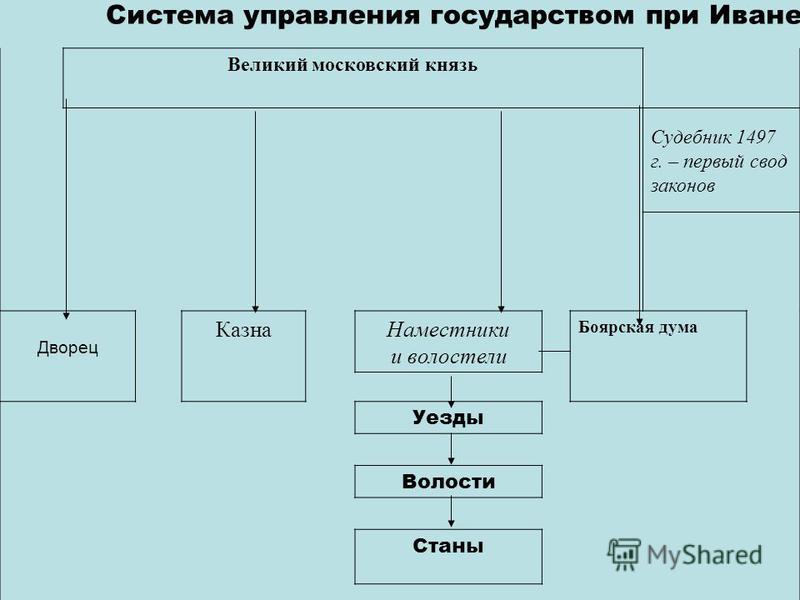 Москва, проспект Вернадского, д.84, кор.3 (9 кор. РАНХиГС), кабинет 2503 Москва, проспект Вернадского, д.84, кор.3 (9 кор. РАНХиГС), кабинет 2503 | – | [email protected] | – |
| Кафедра теоретической социологии и эпистемологии | Вахштайн Виктор Семенович | – | г.Москва, проспект Вернадского, д.84, кор.3 (9 кор. РАНХиГС), кабинет 2503 | – | [email protected] | – |
| Кафедра территориального развития им. В.Л. Глазычева | Зеленцова Елена Валентиновна | – | Пречистенская набережная, д.11, с.1, кабинет 306. | – | [email protected] | – |
| Кафедра философии | Резник Юрий Михайлович | – | г.Москва, проспект Вернадского, д.84, кор.3 (9 кор. РАНХиГС), кабинет 2502 | – | [email protected] | – |
| Кафедра русского языка как иностранного | Курганова Елизавета Владимировна | – | г. Москва, проспект Вернадского, д.84, кор.3 (9 кор. РАНХиГС), кабинет 700 Москва, проспект Вернадского, д.84, кор.3 (9 кор. РАНХиГС), кабинет 700 | – | [email protected] | – |
| Кафедра международного менеджмента | Абрамова Наталья Михайловна | – | г.Москва, проспект Вернадского, д.82, с.3 (2 кор. РАНХиГС), кабинет 122 | – | [email protected] | – |
| Кафедра международной политики и зарубежного регионоведения | Демиденко Сергей Владимирович | – | г.Москва, проспект Вернадского, д.84, кор.3 (9 кор. РАНХиГС), кабинет 2609 | – | [email protected] | – |
| Кафедра словесности | Ершова Ирина Викторовна | – | г.Москва, проспект Вернадского, д.84, кор.3 (9 кор. РАНХиГС), кабинет 2403 | – | shagi-ion@ranepa. ru ru | – |
| Институт отраслевого менеджмента | Федотов Иван Владимирович | и.о. директора | г.Москва, проспект Вернадского, д.82, с.4 (3 кор. РАНХиГС), офис 306 | http://www.iim.ranepa.ru/ | [email protected] | Положение |
| Кафедра иностранных языков | Пьянова Марина Валерьевна | заведующая кафедрой | г.Москва, проспект Вернадского, д.82, с.4 (3 кор. РАНХиГС), кабинет 217 | – | [email protected] | – |
| Факультет рыночных технологий | Игнатьева Юлия Николаевна Минаева Наталья Леонидовна | заместитель декана | г.Москва, проспект Вернадского, д.84, с.2 (6 кор. РАНХиГС), кабинет 2014 | – | – | |
| Кафедра менеджмента недвижимости | Иванкина Елена Владимировна | заведующая кафедрой | г. Москва, проспект Вернадского, д.84, с.2 (6 кор. РАНХиГС), кабинет 2134 Москва, проспект Вернадского, д.84, с.2 (6 кор. РАНХиГС), кабинет 2134 | – | [email protected] | – |
| Кафедра маркетинга и рекламы | – | — | – | – | ||
| Кафедра гуманитарных дисциплин | Логовая Екатерина Спартаковна | заведующая кафедрой | — | – | – | |
| Кафедра управления бизнес-процессами | Маслевич Татьяна Петровна | заведующая кафедрой | — | – | – | |
| Кафедра инвестиционно-строительного бизнеса | Яськова Наталья Юрьевна | заведующая кафедрой | г.Москва, проспект Вернадского, д. 84, с.2 (6 кор. РАНХиГС), кабинет 2014 84, с.2 (6 кор. РАНХиГС), кабинет 2014 | – | [email protected] | – |
| Отделение бакалавриата | Голубь Ирина Викторовна | заведующая отделением | [email protected] | |||
| Отделение магистратуры | Баева Ксения Вячеславовна | заведующая отделением | [email protected] | |||
| Отделение дополнительного образования | Сафиулина Регина Радиковна | заведующая отделением | [email protected] | |||
| Факультет гостеприимства | Бухаров Игорь Олегович | декан | г.Москва, проспект Вернадского, д.84, кор.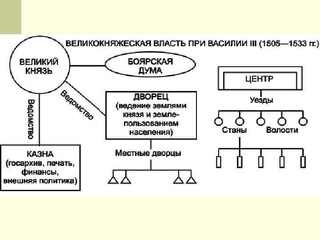 2 (8 кор. РАНХиГС), офис 713 2 (8 кор. РАНХиГС), офис 713 | – | [email protected] | – |
| Учебно-проектная лаборатория гостиничного и ресторанного бизнеса | Галынин Сергей Викторович | заведующий лабораторией | г.Москва, проспект Вернадского, д.84, кор.2 (8 кор. РАНХиГС), офис 706 | – | [email protected] | – |
| Кафедра менеджмента в индустрии гостеприимства | Гончарова Ирина Викторовна | заведующая кафедрой | г.Москва, проспект Вернадского, д.84, кор.2 (8 кор. РАНХиГС), офис 713 | – | [email protected] | – |
| Сектор «Управление принятием решений и поведенческий профайлинг» | Клепиков Олег Евгеньевич | заведующий сектором | г.Москва, проспект Вернадского, д. 84, кор.2 (8 кор. РАНХиГС), офис 713 84, кор.2 (8 кор. РАНХиГС), офис 713 | – | [email protected] | – |
| Факультет инженерного менеджмента | Серебренников Сергей Сергеевич | декан | г.Москва, проспект Вернадского, д.84, с.2 (6 кор. РАНХиГС), офис 3101 | – | [email protected] | – |
| Кафедра теории и систем отраслевого управления | Серебренников Сергей Сергеевич | заведующий кафедрой | г.Москва, проспект Вернадского, д.84, с.2 (6 кор. РАНХиГС), офис 3022 | – | [email protected] | – |
| Факультет управления в медицине и здравоохранении | Печатников Леонид Михайлович | декан | г.Москва, проспект Вернадского, д.82, с.2 (4 кор. РАНХиГС), офис 312 | – | – | |
| Центр подготовки управленческих кадров | Габуева Лариса Аркадьевна | – | г. Москва, проспект Вернадского, д.82, с.2 (4 кор. РАНХиГС), офис 420 Москва, проспект Вернадского, д.82, с.2 (4 кор. РАНХиГС), офис 420 | – | [email protected] | – |
| Центр «Международная школа управления «Интенсив»» | Воронов Виктор Васильевич | директор | г.Москва, проспект Вернадского, д.84, с.2 (6 кор. РАНХиГС), офис 3096 | – | [email protected] | – |
| Учебный центр ПАО «Транснефть» | Журавская Галина Станиславовна | директор | г.Москва, проспект Вернадского, д.84, с.2 (6 кор. РАНХиГС), офис 3111, 3113 | http://www.transneft.ranepa.ru/ | [email protected] | – |
| Центр «Школа кадрового менеджмента» | Травин Виктор Валентинович | директор | г.Москва, проспект Вернадского, д. 82, с.1 (5 кор. РАНХиГС), офис.607 82, с.1 (5 кор. РАНХиГС), офис.607 | — | [email protected] | – |
| Центр «Фабрика предпринимательства» | Газизуллина Альбина Рамильевна | заместитель директора | г.Москва, проспект Вернадского, д.84, с.2 (6 кор. РАНХиГС), кабинет 2120 | – | [email protected] | – |
| Институт «Высшая школа государственного управления» | Комиссаров Алексей Геннадиевич | директор | г.Москва, проспект Вернадского, д.82, с.1 (5 кор. РАНХиГС), офис.508 | http://hspa.ranepa.ru/ | [email protected] | Положение |
| Факультет оценки и развития управленческих кадров | Шебураков Илья Борисович | – | г.Москва, проспект Вернадского, д.84, с.2 (6 кор. РАНХиГС), кабинет 2098 | – | sheburakov-ib@ranepa. ru ru | – |
| Кафедра психологии личности в системах управления | Синягин Юрий Викторович | – | г.Москва, проспект Вернадского, д.84, с.2 (6 кор. РАНХиГС), кабинет 2098 | – | [email protected] | – |
| Кафедра менеджмента | Быковников Илья Леонидович | – | г.Москва, проспект Вернадского, д.84, с.2 (6 кор. РАНХиГС), кабинет 2098 | – | [email protected] | – |
| Кафедра государственного и муниципального управления | Быковников Илья Леонидович | – | г.Москва, проспект Вернадского, д.84, с.2 (6 кор. РАНХиГС), кабинет 2098 | – | [email protected] | – |
| Институт права и национальной безопасности | Могилевский Станислав Дмитриевич | директор | г. Москва, проспект Вернадского, 84, с.2 (6 кор. РАНХиГС), офис 1116, 1118 Москва, проспект Вернадского, 84, с.2 (6 кор. РАНХиГС), офис 1116, 1118 | http://www.ilns.ranepa.ru/ | [email protected] | Положение |
| Кафедра социально-гуманитарных, экономических и естественно-научных дисциплин | Выжигин Александр Юрьевич | – | г.Москва, проспект Вернадского, д.84, стр.2 (6 кор. РАНХиГС), кабинет 1109 | – | [email protected] | – |
| Кафедра международной безопасности внешнеполитической деятельности России | Михайленко Александр Николаевич | – | г.Москва, проспект Вернадского, д.84, кор.2 (8 кор. РАНХиГС), кабинет 1107 | – | [email protected] | – |
| Кафедра государственного управления и национальной безопасности | Шевченко Алевтина Владимировна | – | г.Москва, проспект Вернадского, д. 84, кор.2 (8 кор. РАНХиГС), кабинет 1108 84, кор.2 (8 кор. РАНХиГС), кабинет 1108 | – | [email protected] | – |
| Кафедра конфликтологии и миграционной безопасности | Пилипенко Сергей Александрович | – | г.Москва, проспект Вернадского, д.84, кор.2 (8 кор. РАНХиГС), кабинет 1107 | – | [email protected] | – |
| Кафедра экономической безопасности | Ломакин Андрей Леонидович | – | г.Москва, проспект Вернадского, д.84, кор.2 (8 кор. РАНХиГС), кабинет 1107 | – | [email protected] | – |
| Кафедра административного и информационного права | Шмалий Оксана Васильевна | – | г.Москва, проспект Вернадского, д.84, кор.2 (8 кор. РАНХиГС), кабинет 628 | – | shmaliy-ov@ranepa. ru ru | – |
| Кафедра банковского права и финансово-правовых дисциплин | Узденов Шамиль Шагабанович | – | г.Москва, проспект Вернадского, д.84, кор.2 (8 кор. РАНХиГС), кабинет 1116 | – | [email protected] | – |
| Кафедра гражданского права и процесса | Комарицкий Сергей Иванович | – | г.Москва, проспект Вернадского, д.84, стр.2 (6 кор. РАНХиГС), кабинет 1109 | – | [email protected] | – |
| Кафедра истории государства и права | Лаптева Людмила Евгеньевна | – | г.Москва, проспект Вернадского, д.84, кор.2 (8 кор. РАНХиГС), кабинет 1103 | – | [email protected] | – |
| Кафедра конкурентного права | Тенишев Андрей Петрович | – | г.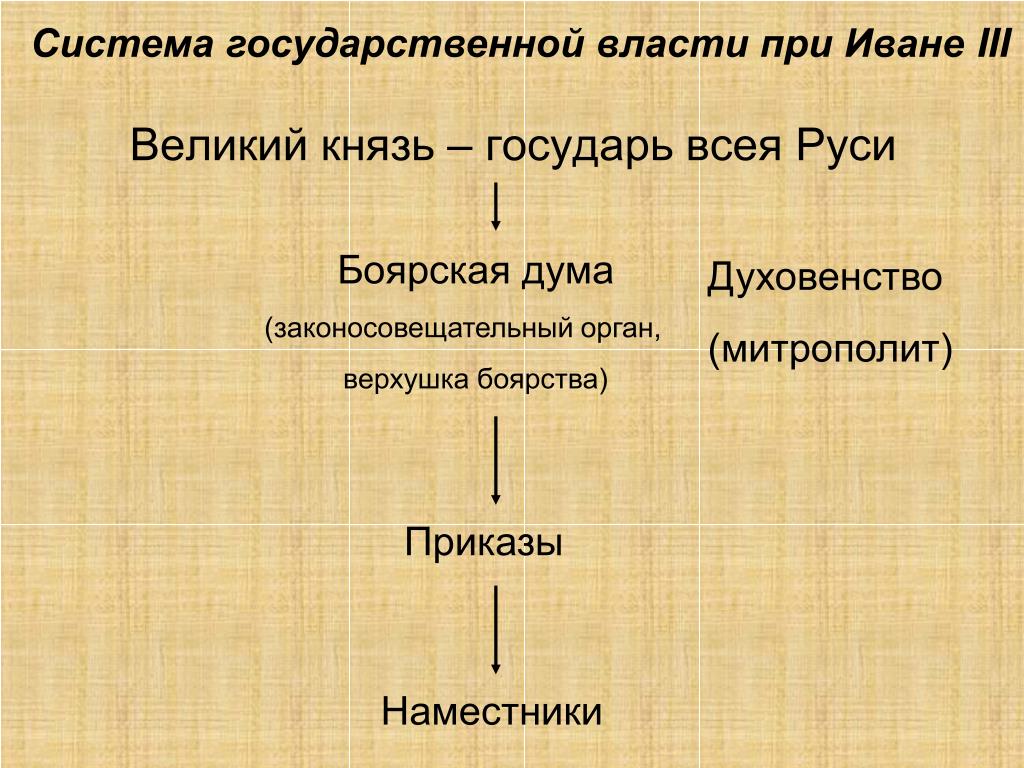 Москва, проспект Вернадского, д.84, стр.2 (6 кор. РАНХиГС), кабинет 1109 Москва, проспект Вернадского, д.84, стр.2 (6 кор. РАНХиГС), кабинет 1109 | – | [email protected] | – |
| Кафедра конституционного права | Чепунов Олег Иванович | – | г.Москва, проспект Вернадского, д.84, кор.2 (8 кор. РАНХиГС), кабинет 1112 | – | [email protected] | – |
| Кафедра международного и интеграционного права | Матвеева Татьяна Дмитриевна | – | г.Москва, проспект Вернадского, д.84, стр.2 (6 кор. РАНХиГС), кабинет 1109 | – | [email protected] | – |
| Кафедра основ правоохранительной деятельности | Романов Александр Константинович | – | г.Москва, проспект Вернадского, д.84, стр.2 (6 кор. РАНХиГС), кабинет 1109 | – | romanov-ак@ranepa. ru ru | – |
| Кафедра предпринимательского, трудового и корпоративного права | Лескова Юлия Геннадьевна | – | г.Москва, проспект Вернадского, д.84, кор.2 (8 кор. РАНХиГС), кабинет 1103 | – | [email protected] | – |
| Кафедра теории государства и права им. Г.В. Мальцева | Лукьянова Елена Геннадьевна | – | г.Москва, проспект Вернадского, д.84, кор.2 (8 кор. РАНХиГС), кабинет 1112 | – | [email protected] | – |
| Кафедра правового обеспечения национальной безопасности | Куражов Алексей Васильевич | – | г.Москва, проспект Вернадского, д.84, стр.2 (6 кор. РАНХиГС), кабинет 1109 | – | [email protected] | – |
| Кафедра правового регулирования таможенного дела | Степаненко Михаил Васильевич | – | г.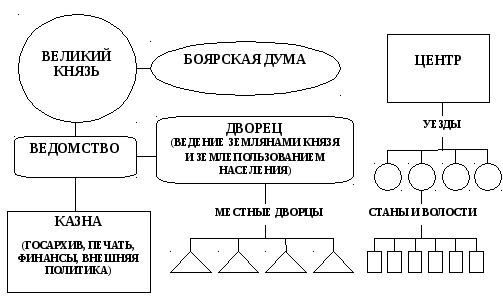 Москва, проспект Вернадского, д.84, кор.2 (8 кор. РАНХиГС), кабинет 1100 Москва, проспект Вернадского, д.84, кор.2 (8 кор. РАНХиГС), кабинет 1100 | – | [email protected] | – |
| Кафедра таможенных платежей и валютного контроля | Скудалова Татьяна Викторовна | – | г.Москва, проспект Вернадского, д.84, кор.2 (8 кор. РАНХиГС), кабинет 1100 | – | [email protected] | – |
| Кафедра организации таможенного контроля и проведения таможенных операций | Левинская Елена Васильевна | – | г.Москва, проспект Вернадского, д.84, кор.2 (8 кор. РАНХиГС), кабинет 1100 | – | [email protected] | – |
| Факультет «Высшая школа корпоративного управления» | Календжян Сергей Оганович | декан | г.Москва, проспект Вернадского, д.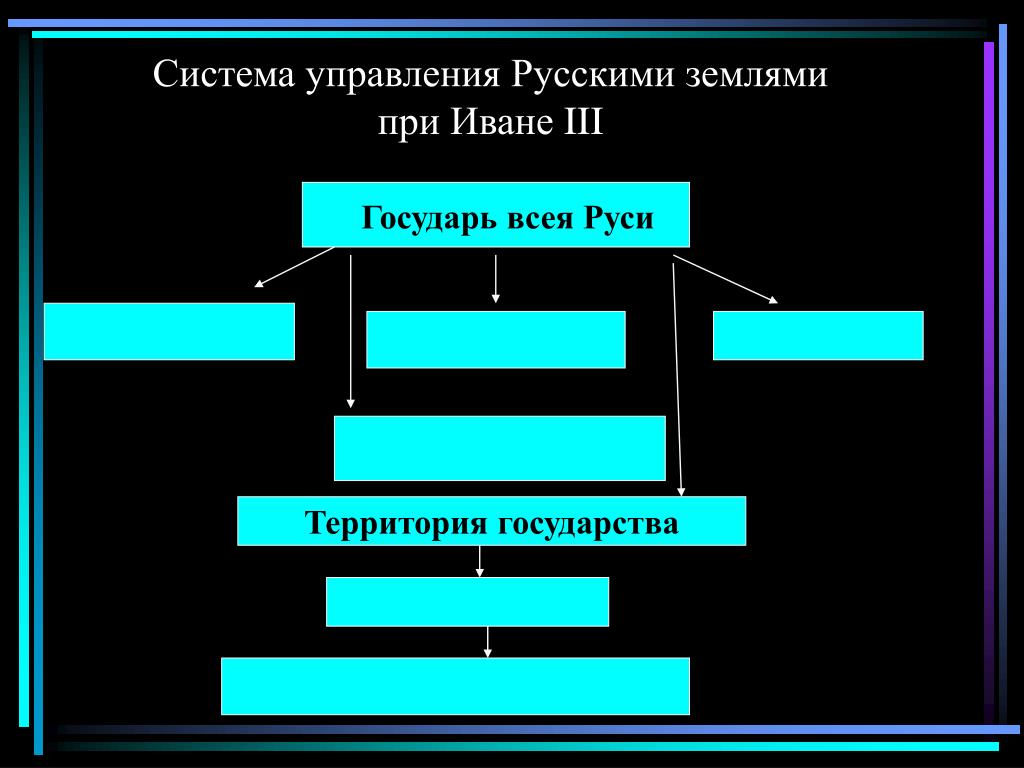 82, с.2 (4 кор. РАНХиГС), офис 509-515; проспект Вернадского, д.82, с.1 (5 кор. РАНХиГС), офисы 404, 507 82, с.2 (4 кор. РАНХиГС), офис 509-515; проспект Вернадского, д.82, с.1 (5 кор. РАНХиГС), офисы 404, 507 | https://gscm.ranepa.ru/ | [email protected] | Положение |
| Кафедра корпоративного управления | Календжян Сергей Оганович | – | г.Москва, проспект Вернадского, д.82, с.1 (5 кор. РАНХиГС), кабинет 404-а | – | [email protected] | – |
| Кафедра международной коммерции | Саламатов Владимир Юрьевич | – | г.Москва, проспект Вернадского, д.82, с.2 (4 кор. РАНХиГС), кабинет 409 | – | [email protected] | – |
| Кафедра управления фирмой | Крылатых Эльмира Николаевна | – | г.Москва, проспект Вернадского, д.82, с.2 (4 кор. РАНХиГС), кабинет 515 | – | rgs-om@ranepa. ru ru | – |
| Факультет «Высшая школа финансов и менеджмента» | Лобанова Елена Николаевна | декан | г.Москва, проспект Вернадского, д.82, с.1 (5 кор. РАНХиГС), офис. 301, 302, 303 | http://www.shfm.ranepa.ru/ | [email protected] | Положение |
| Кафедра корпоративных финансов, инвестиционного проектирования и оценки им. М.А. Лимитовского | Минасян Виген Бабкенович | – | г.Москва, проспект Вернадского, д.82, с.1 (5 кор. РАНХиГС), кабинет 303 | – | [email protected] | – |
| Кафедра финансового менеджмента, управленческого учета и международных стандартов финансовой деятельности | Лобанова Елена Николаевна | – | г.Москва, проспект Вернадского, д.82, с.1 (5 кор. РАНХиГС), кабинет 303 | – | lobanova@ranepa.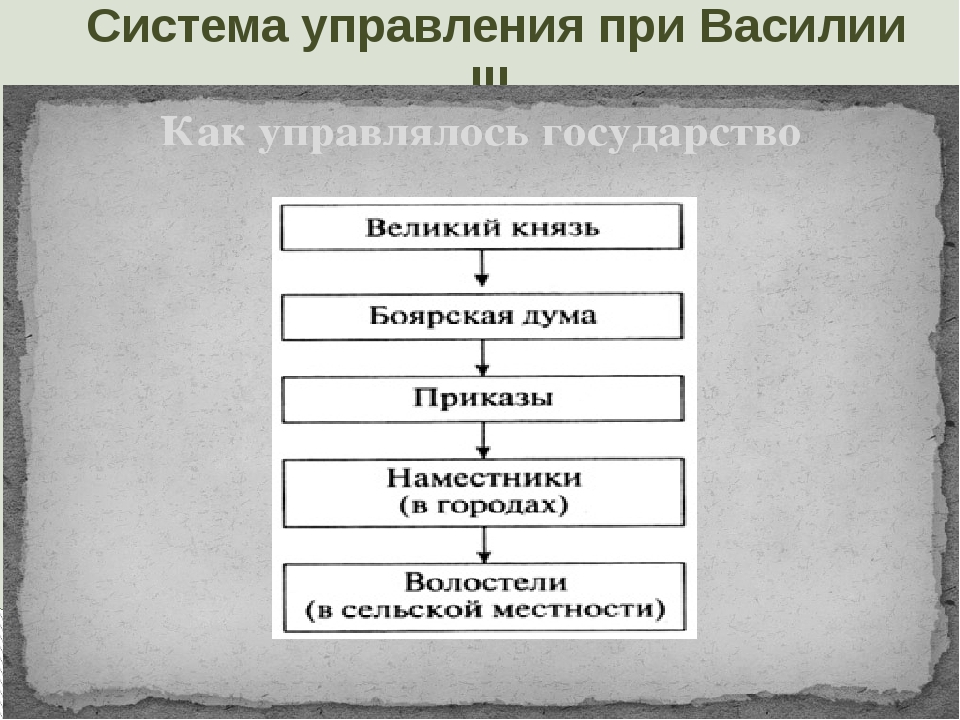 ru ru | – |
| Институт управления и регионального развития | Буташин Дмитрий Анатольевич | директор | г.Москва, проспект Вернадского, д.82, с.1 (5 кор. РАНХиГС), кабинет 311 | iurr.ranepa.ru/ | [email protected] | Положение |
| Факультет маркетинга и международного сотрудничества | — | – | г.Москва, проспект Вернадского, д.82, с.1 (5 кор. РАНХиГС), офис 329, 330 | http://www.hsimm.ranepa.ru/ | [email protected] | Положение |
| Кафедра внутрифирменного управления, логистики, реструктуризации и стратегического менеджмента | Проценко Инга Олеговна | – | г.Москва, проспект Вернадского, д.84, с.2 (6 корп. РАНХиГС), кабинет 3001 | – | [email protected] | – |
| Кафедра маркетинга | Клебанов Алексей Ильич | – | г.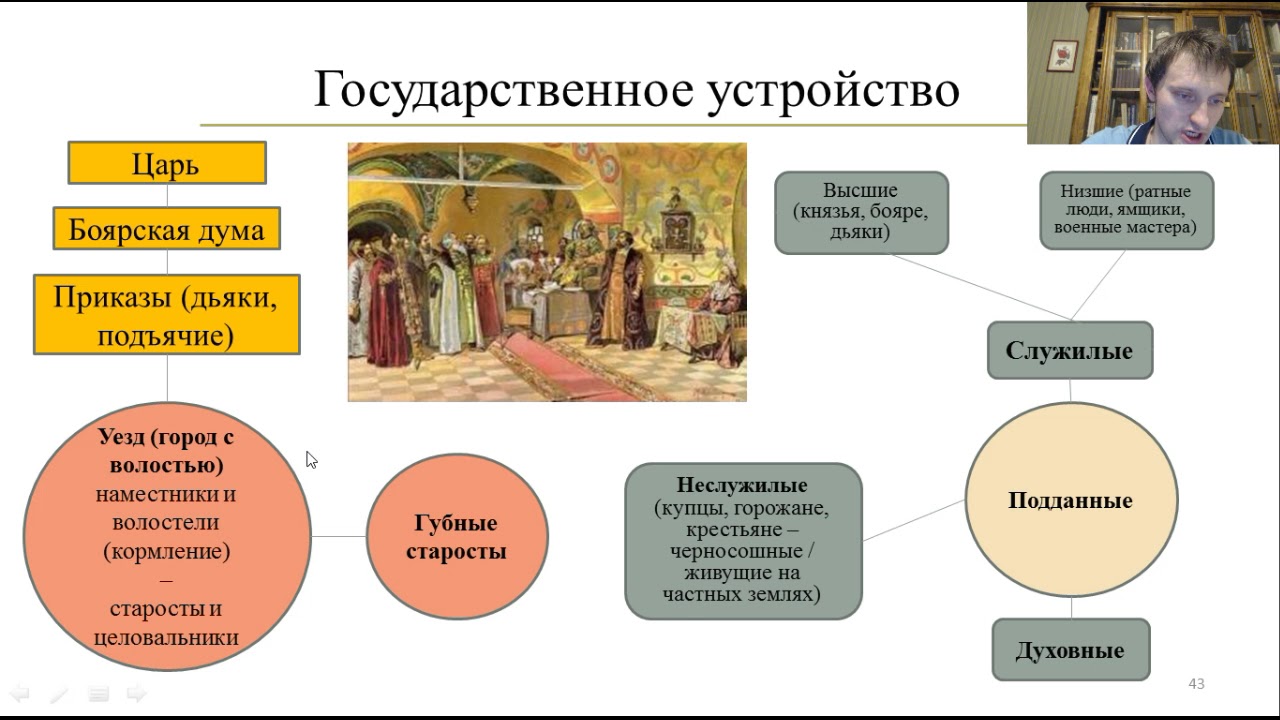 Москва, проспект Вернадского, д.82, с.1 (5 кор. РАНХиГС), кабинет 335 Москва, проспект Вернадского, д.82, с.1 (5 кор. РАНХиГС), кабинет 335 | – | [email protected] | – |
| Кафедра «Международное сотрудничество» | Семедов Семед Абакаевич | – | г.Москва, проспект Вернадского, д.82, с.2 (4 кор. РАНХиГС), кабинет 213 | – | [email protected] | – |
| Кафедра финансов и страхования | Миллерман Александр Самуилович | – | г.Москва, проспект Вернадского, д.82, с.1 (5 кор. РАНХиГС), кабинет 328 | – | [email protected] | – |
| Кафедра проблем рынка и хозяйственного механизма | Проценко Олег Дмитриевич | – | г.Москва, проспект Вернадского, д.84, с.2 (6 корп. РАНХиГС), кабинет 3001 | – | [email protected] | – |
| Факультет экономических и социальных наук | Чичин Александр Васильевич | – | г. Москва, проспект Вернадского,д.82, с.1 (5 кор. РАНХиГС), офис 305 Москва, проспект Вернадского,д.82, с.1 (5 кор. РАНХиГС), офис 305 | http://www.fesn.ranepa.ru/ | [email protected] | Положение |
| Кафедра английского языка | Липина Анна Алексеевна | – | г.Москва, проспект Вернадского, д.82, с.1 (5 кор. РАНХиГС), кабинет 305 | – | [email protected] | – |
| Кафедра вторых иностранных языков | Чичин Александр Васильевич | – | г.Москва, проспект Вернадского, д.82, с.1 (5 кор. РАНХиГС), кабинет 305 | – | [email protected] | – |
| Кафедра менеджмента и предпринимательства | Голубков Евгений Петрович | – | г.Москва, проспект Вернадского, д.82, с.1 (5 кор. РАНХиГС), кабинет 304 | – | [email protected] | – |
| Кафедра социально-гуманитарных дисциплин | Зарецкая Елена Наумовна | – | г. Москва, проспект Вернадского, д.82, с.1 (5 кор. РАНХиГС), кабинет 304 Москва, проспект Вернадского, д.82, с.1 (5 кор. РАНХиГС), кабинет 304 | – | [email protected] | – |
| Кафедра экономики и финансов | Дворецкая Алла Евгеньевна | – | г.Москва, проспект Вернадского, д.82, с.1 (5 кор. РАНХиГС), кабинет 304 | – | [email protected] | – |
| Факультет финансов и банковского дела | Насибян Седа Саркисовна | – | г.Москва, проспект Вернадского, д.82, с.1 (5 кор. РАНХиГС), офис 431 | http://ffb.ranepa.ru/ | [email protected] | Положение |
| Кафедра экономической теории и политики | Аганбегян Абел Гезевич | – | г.Москва, проспект Вернадского, д.82, с.1 (5 кор. РАНХиГС), офис 431 | – | [email protected] | – |
| Кафедра финансы, денежное обращение и кредит | Хандруев Александр Андреевич | – | г. Москва, проспект Вернадского, д.82, с.1 (5 кор. РАНХиГС), офис 431 Москва, проспект Вернадского, д.82, с.1 (5 кор. РАНХиГС), офис 431 | – | [email protected] | – |
| Кафедра регулирования деятельности финансовых институтов | Турбанов Александр Владимирович | – | г.Москва, проспект Вернадского, д.82, с.1 (5 кор. РАНХиГС), офис 431 | – | [email protected] | – |
| Кафедра фондовых рынков и финансового инжиниринга | Корищенко Константин Николаевич | – | г.Москва, проспект Вернадского, д.82, с.1 (5 кор. РАНХиГС), офис 431 | – | [email protected] | – |
| Кафедра бухгалтерского учета, экономического анализа и аудита | Чипуренко Елена Викторовна | – | г.Москва, проспект Вернадского, д.82, с.1 (5 кор. РАНХиГС), офис 431 | – | ffb@ranepa. ru ru | – |
| Институт экономики, математики и информационных технологий | Радыгин Александр Дмитриевич | директор | г.Москва, проспект Вернадского, д.82, с.1 (5 кор. РАНХиГС), офис 205 | http://www.ef.ranepa.ru/index.php/ru/ | [email protected] | Положение |
| Отделение экономики | Радыгин Александр Дмитриевич | – | г.Москва, проспект Вернадского, д.82, с.1 (5 кор. РАНХиГС), офис 205 | http://economy.ranepa.ru/ | [email protected] | – |
| Отделение национальной экономики | Казарян Маргарита Альбертовна | – | г.Москва, проспект Вернадского, д.82, с.1 (5 кор. РАНХиГС), офис 205 | http://one.ranepa.ru/ | [email protected] | – |
| Отделение бизнес-информатики | Веригина Галина Михайловна | – | г. Москва, проспект Вернадского, д.82, с.3 (2 кор. РАНХиГС), офис 124-а Москва, проспект Вернадского, д.82, с.3 (2 кор. РАНХиГС), офис 124-а | http://bi.ranepa.ru/ | [email protected] | – |
| Отделение прикладной информатики | Пегасова Лидия Викторовна | – | г.Москва, проспект Вернадского, д.82, с.3 (2 кор. РАНХиГС), офис 208-209 | http://www.ip-fne.ranepa.ru/ | [email protected] | – |
| Школа IT-менеджмента | Соколов Александр Игоревич | – | г.Москва, проспект Вернадского, д.82, с.3 (2 кор. РАНХиГС), офис 126 | http://itm.ranepa.ru/ | [email protected] | – |
| Центр налогового администрирования и финансового управления | Сулейманов Джабраил Нохаевич | – | г.Москва, проспект Вернадского, д.82, с.3 (2 кор. РАНХиГС), офис 207, 216 | http://nalogadmin. ranepa.ru/ ranepa.ru/ | [email protected] | – |
| Центр экспертизы образовательных программ | Нишукова Ольга Юрьевна | директор | г.Москва, проспект Вернадского, д. 82, корп. 5, офис 605 | – | [email protected] | Положение |
| Кафедра макроэкономики | Шагас Наталья Леонидовна | – | г.Москва, проспект Вернадского, д.82, с.2 (4 кор. РАНХиГС), офис 306 | – | [email protected] | – |
| Кафедра микроэкономики | Левин Марк Иосифович | – | г.Москва, проспект Вернадского, д.82, с.2 (4 кор. РАНХиГС), офис 303 | – | [email protected] | – |
| Кафедра национальной экономики | Казарян Маргарита Альбертовна | – | г.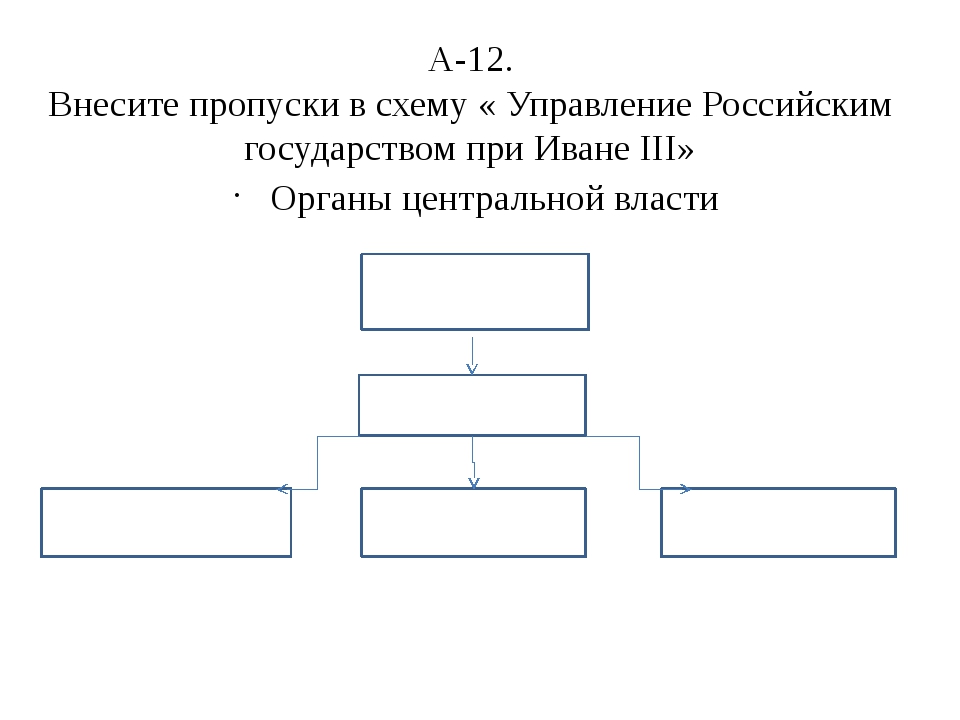 Москва, проспект Вернадского, д.84, с.2 (6 кор. РАНХиГС), офис 2124 Москва, проспект Вернадского, д.84, с.2 (6 кор. РАНХиГС), офис 2124 | – | [email protected] | – |
| Кафедра политико-правовых дисциплин и социальных коммуникаций | Казанчев Юрий Дмитриевич | – | г.Москва, проспект Вернадского, д.82, с.2 (4 кор. РАНХиГС), офис 404 | – | [email protected] | – |
| Кафедра системного анализа и информатики | Маруев Сергей Александрович | – | г.Москва, проспект Вернадского, д.82, с.2 (4 кор. РАНХиГС), офис 408 | – | [email protected] | – |
| Кафедра систем управления бизнес-процессами | Рыжов Александр Павлович | – | г.Москва, проспект Вернадского, д.82, с.3 (2 кор. РАНХиГС), офис 207 | – | mishkina-ao@ranepa. ru ru | – |
| Кафедра эконометрики и математической экономики | Носко Владимир Петрович | – | г.Москва, проспект Вернадского, д.82, с.2 (4 кор. РАНХиГС), офис 203 | – | [email protected] | – |
| Институт финансов и устойчивого развития | Марголин Андрей Маркович | директор | г.Москва, проспект Вернадского, д.82, с.1 (5 кор. РАНХиГС), офис 315 | http://ifur.ranepa.ru/ | [email protected] | Положение |
| Федеральный институт развития образования | Алиева Эвелина Факировна | И.о. директора | г.Москва, ул. Черняховского, д.9, стр.1 | http://firo.ranepa.ru/ | [email protected] | Положение |
| Кафедра физического воспитания и здоровья | Шувалов Александр Михайлович | – | г. Москва, проспект Вернадского, д.82, с.3 (2 кор. РАНХиГС), 1 этаж Москва, проспект Вернадского, д.82, с.3 (2 кор. РАНХиГС), 1 этаж | – | [email protected] | Положение |
| Лицей Президентской академии | Подковыркина Жанна Валерьерьевна | – | г.Москва, проспект Вернадского, д.82, с.4 (3 кор. РАНХиГС) | http://ranepa-lyceum.ru/ | [email protected] | Положение |
| Колледж многоуровневого профессионального образования | Гриненко Сергей Алексеевич | директор | г. Москва, Волгоградский проспект, д.43. | http://kmpo.ranepa.ru/ | [email protected] | Положение |
| Управление аспирантуры и докторантуры | Гуслистая Татьяна Вячеславовна | начальник управления | г. Москва, проспект Вернадского, 84, корпус 8, 9 этаж | [email protected] | Положение | |
| Департамент региональной политики | Арсенян Арташес Завенович | – | г.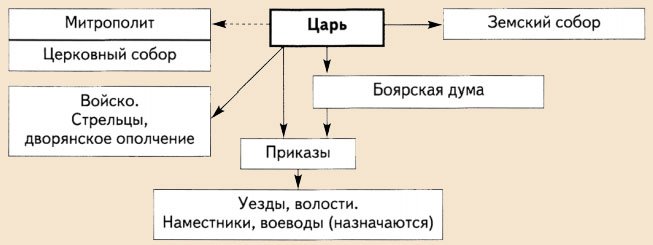 Москва, проспект Вернадского, д.84, кор.3 (9 кор. РАНХиГС), офисы 300, 302, 304, 305 Москва, проспект Вернадского, д.84, кор.3 (9 кор. РАНХиГС), офисы 300, 302, 304, 305 | – | [email protected] | Положение |
Студенческий совет Академии | Гайдуков Кирилл Игоревич | председатель | г.Москва, проспект Вернадского, д.82, переход между с.1 и с.2 | /ssa?&landing | [email protected] | Положение |
Структурные подразделения УФНС России | ФНС России
Основные направления деятельности:
1. Формирует и представляет в ФНС России налоговую статистическую отчетность по формам №№1-НМ «О начислении и поступлении налогов, сборов и иных обязательных платежей в бюджетную систему РФ», 1-НОМ «Отчет о начислении и поступлении налоговых платежей в бюджетную систему РФ по основным видам экономической деятельности», 2-ЕМ «Отчет о поступлении доходов в Федеральный бюджет, консолидированный бюджет субъекта РФ, страховых взносов на обязательное социальное страхование, администрируемых налоговыми органами в РФ».
2. Организует работу инспекций ФНС России по г. Москве по обеспечению учета поступления налогов, сборов и иных обязательных платежей, администрируемых налоговыми органами, обеспечивает контроль за правильностью обработки и учета информации в действующем программном комплексе.
3. Осуществляет контроль за достоверностью данных информационного ресурса «Расчеты с бюджетом», передаваемого на региональный уровень налоговыми инспекциями г. Москвы, межрегиональными ИФНС России по крупнейшим налогоплательщикам, Управлениями ФНС России по субъектам Российской Федерации и подготавливает материалы для принятия мер к устранению выявленных нарушений.
4. Осуществляет представление данных информационного ресурса «Расчеты с бюджетом» регионального уровня с кодами ОКТМО других субъектов Российской Федерации, в том числе по налогу на добычу полезных ископаемых (НДПИ) отдельно по каждому субъекту Российской Федерации и передачу указанных данных в Управления ФНС России по субъектам Российской Федерации.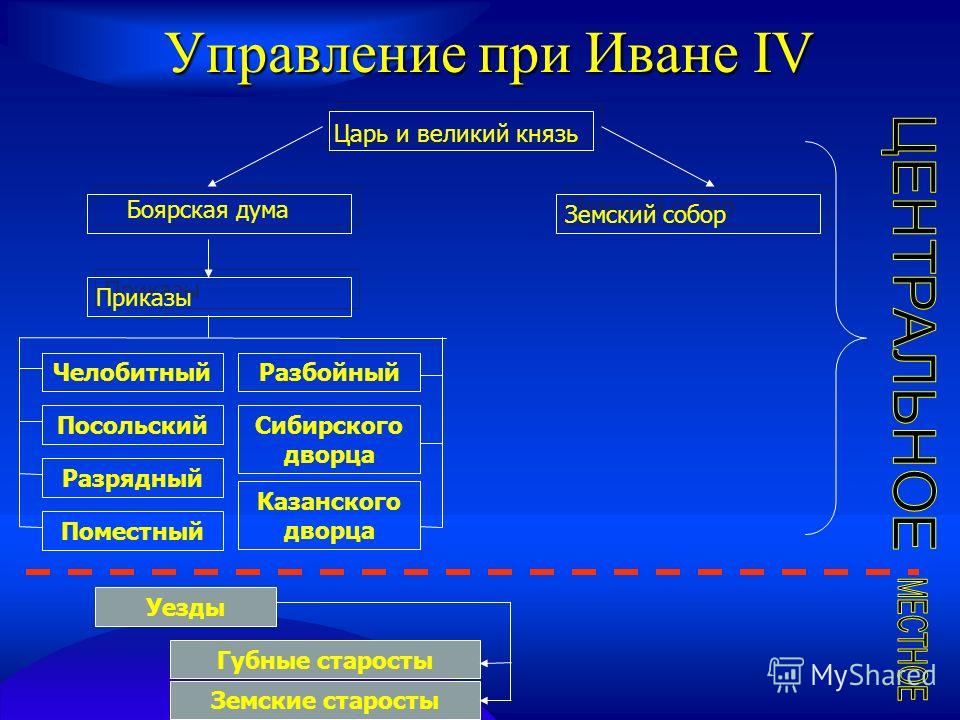
5. Подготавливает и направляет в отделы Управления информацию в разрезе инспекций для осуществления мониторинга, анализа и контроля по начисленным и поступившим суммам налогов, сборов и иных обязательных платежей, отраженным в информационном ресурсе «Расчеты с бюджетом».
6. Формирует «Реестры о поступлении в бюджеты», «Реестры начисленных сумм налогов, сборов, пеней, процентов и налоговых санкций» и «Реестры сумм платежей, по декларациям (расчетам, сведениям из регистрирующих органов) отсутствуют», администрируемых ФНС России и представляет их в финансовый отдел Управления.
7. Обеспечивает ежедневное получение от Управления федерального казначейства по г. Москве информации о поступлении платежей в соответствии с приказом Минфина России от 18.12.2013г. № 125н.
8. Осуществлять загрузку файлов (формата XML) в базу данных для налоговых Инспекций, с информацией по налоговым платежам физических лиц (электронный документооборот) в рамках заключенного договора со Сбербанком России, а также мониторинг обработки данных файлов и сверка с платежными поручениями.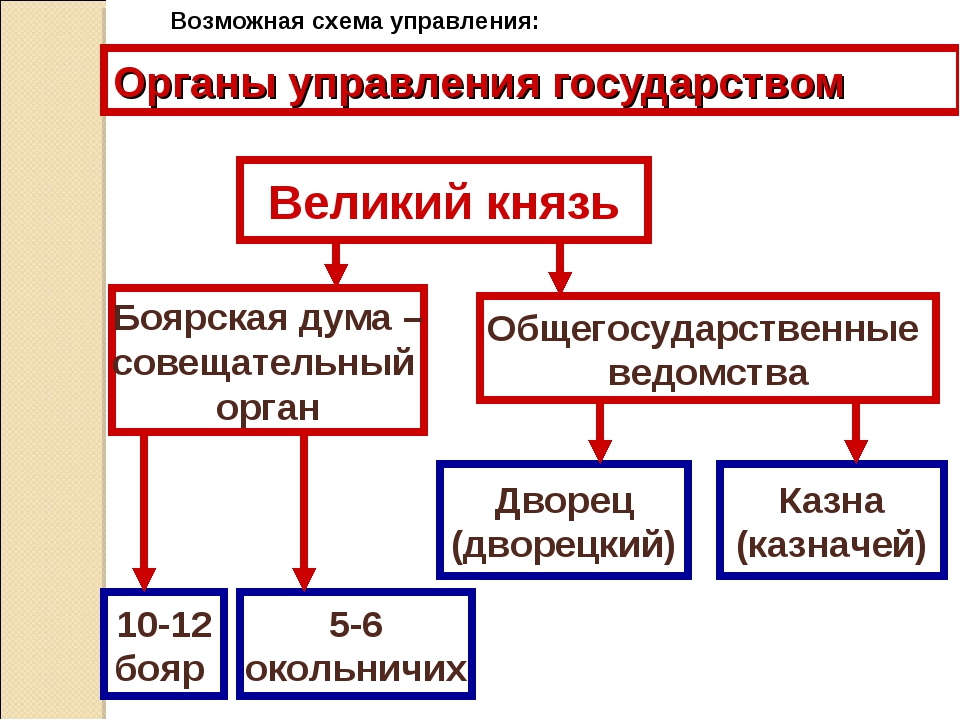
9. Осуществляет учет поступающих сумм платежей в доходы бюджетов Российской Федерации путем ведения программного продукта по поступившим и возвращенным суммам платежей, администрируемым налоговыми органами, как по счету № 40101, так и по уровням бюджетов.
10. Осуществляет сверку отчетных данных о поступлениях и возвратах (выплатах) на балансовый счет № 40101 по платежам, подлежащим администрированию Федеральной налоговой службой с отчетными данными УФК по г. Москве.
11. Представляет информацию по вопросам, входящим в компетенцию отдела.
12. Осуществляет работу по выяснению вида и принадлежности платежей, отнесенных Управлением федерального казначейства по г. Москве в разряд «невыясненных». Формирует Уведомления формы № 54 для направления платежей по назначению и принадлежности.
| Наименование структурного подразделения | ФИО руководителя структурного подразделения | Должность руководителя структурного подразделения | Адрес местонахождения структурного подразделения | Адрес официального сайта в сети «Интернет» | Адреса электронной почты структурного подразделения | Положение об органе управления/ о структурном подразделении | Контактный телефон |
| Управление подготовки кадров высшей квалификации | Сафир Романна Евгеньевна | Начальник управления | 117198, г.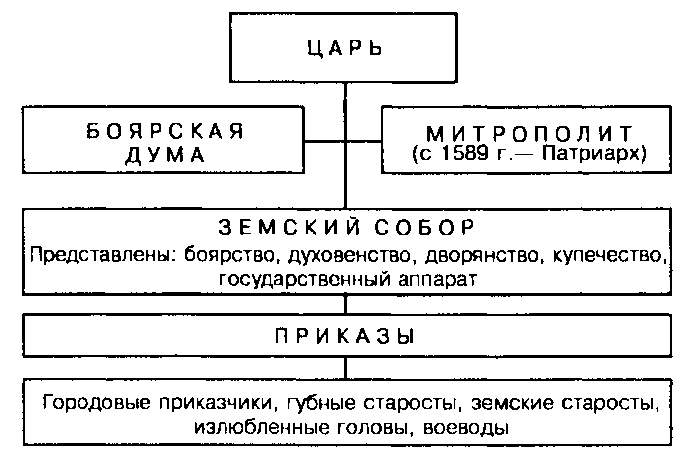 Москва, ул. Миклухо-Маклая, д. 10, корп. 3 Москва, ул. Миклухо-Маклая, д. 10, корп. 3 |
Гиперссылка | [email protected] | Положение | (495) 433-03-98 |
| Научное управление | Докукин Пётр Александрович | Начальник управления | 117198, Москва, ул. Миклухо-Маклая, 6 | Гиперссылка | [email protected] | Положение | (495) 954-12-71 |
| Департамент аттестации научных кадров | Дробышева Лилиана Валерьевна | Директор | 117198, г. Москва, ул. Миклухо-Маклая, д. 6, каб. 3Г | Гиперссылка | academ. [email protected] [email protected] |
Положение | (499) 936-86-14 |
| Центр мониторинговых исследований | Пузанова Жанна Васильевна | Директор | 117198, г. Москва, ул. Миклухо-Маклая ул., 10 корп.2,каб. 309 | [email protected] | Положение | (495) 433-20-22 (12-23) | |
|
Центр цифровых технологий |
Бахарев Алексей Евгеньевич |
Директор | [email protected] | Положение | |||
| Институт медико-биологических технологий | Зудин Александр Борисович | Директор | 115093, г. Москва, ул. Подольское шоссе, д. 8, стр. 5, каб. 501 Москва, ул. Подольское шоссе, д. 8, стр. 5, каб. 501 |
Гиперссылка | [email protected] | Положение | (495) 989-45-93 |
|
Научно-образовательный институт современных языков, межкультурной коммуникации и миграции |
Москвичева Светлана Алексеевна | Директор | 117198, г. Москва, ул. Миклухо-Маклая ул., 10 корп.2, каб. 507 | Гиперссылка | [email protected] | Положение | (495) 787-38-03 (11-59) |
| Институт биохимической технологии и нанотехнологии | Станишевский Ярослав Михайлович | Директор | 117198, Москва, ул.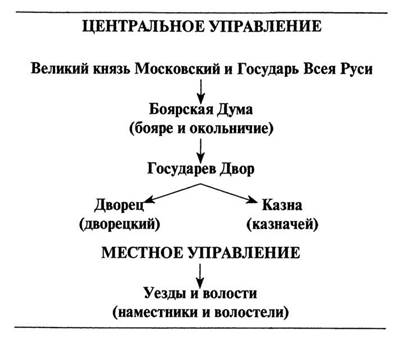 Миклухо-Маклая д. 10/2, офис П18, П16, П9 Миклухо-Маклая д. 10/2, офис П18, П16, П9 |
Гиперссылка | [email protected] | Положение | (499) 936-86-25 |
| Международный институт стратегического развития отраслевых экономик | Савенкова Елена Викторовна | Директор | 117198, г. Москва, ул. Миклухо-Маклая, д. 11А, каб. 721, 722 | Гиперссылка | [email protected] | Положение | (499) 936-85-52 (2552) |
| Отдел стандартизации и метрологии | Ривкин Алексей Владимирович | Начальник отдела | 115419, Москва, ул. Орджоникидзе, д. 3 3 |
Гиперссылка | [email protected] | Положение | (495) 495-08-47 |
| Институт стратегических исследований и прогнозов | Егорченков Дмитрий Александрович | Директор | 117198, г. Москва, ул. Миклухо-Маклая, д. 6, каб. 311 | Гиперссылка | [email protected] | Положение | (499) 936-86-23 |
| Редакции журналов: «Вестник РУДН» и «Современные проблемы математики» | Зарюто Сергей Алексеевич | Заместитель директора | 115419, г. Москва, ул. Орджоникидзе, д. 3 | Гиперссылка | zaryuto-sa@rudn. ru ru |
ПоложениеПоложение | (495) 955-09-55 |
| Центр коллективного пользования «Физико-химические исследования новых материалов, веществ и каталитических систем» | Лобанов Николай Николаевич | Директор | 115419, г. Москва, ул. Орджоникидзе, д. 3, каб. 1б | Гиперссылка | [email protected] | Положение | (495) 955-09-83 |
|
Клинико-диагностический центр |
Линниченко Юрий Валентинович |
Директор | 117198, г. Москва, ул. Миклухо-Маклая, д. 10 | Гиперссылка | cdc@rudn. ru ru |
Положение | (495) 787-38-03 (19-99) |
|
Научно-образовательный ресурсный центр «Фармация» |
Аверкин Олег Олегович | Директор | 117198, г. Москва, ул. Миклухо-Маклая, д. 10/2 | Положение | |||
|
Научно-образовательный ресурсный центр «Высокопроизводительные методы геномного анализа» |
Троценко Иван Дмитриевич | Директор | 117198, г. Москва, ул. Миклухо-Маклая, д. 10/2 | trotsenko-id@rudn. ru ru |
Положение | ||
|
Научно-образовательный ресурсный центр «Инновационные технологии иммунофенотипирования, цифрового пространственного профилирования и ультраструктурного анализа» |
Атякшин Дмитрий Андреевич | Директор | 117198, г. Москва, ул. Миклухо-Маклая, д. 10/2 | [email protected] | Положение | ||
|
Научно-образовательный ресурсный центр «Клеточные технологии» |
Люндуп Алексей Валерьевич | Директор | 117198, г. Москва, ул. Миклухо-Маклая, д. 10/2 | liundup-av@rudn. ru ru |
Положение | ||
|
Дирекция (проектный офис) программы «Научно-образовательный биомедицинский кластер «Трансляционная медицина» |
Румянцев Сергей Александрович | Руководитель | 117198, Москва, ул. Миклухо-Маклая, 6 | [email protected] | Положение | ||
| Институт инновационных инженерных технологий | Директор | 117198, ЮЗАО, г.Москва, ул. Миклухо-Маклая, д. 10, корп. 2, крыло «А», каб. 63 | [email protected] | Положение | |||
|
Научно-исследовательский институт развития мозга и высших достижений |
Директор | Положение |
| Органы управления | ||||||
|---|---|---|---|---|---|---|
1. Ректорат Ректорат |
Погосян Михаил Асланович | Ректор | ||||
| 2. Проректор по учебной работе | Козорез Дмитрий Александрович | Проректор по учебной работе | 125993, г. Москва, Волоколамское шоссе, д.4, каб.211 | ссылка | [email protected] | |
| 3. Проректор по научной работе | Равикович Юрий Александрович | Проректор по научной работе | 125993, г. Москва, Волоколамское шоссе, д.4, каб.238 | ссылка | science@mai. ru ru |
|
| 4. Проректор по развитию комплекса университета и социальным вопросам | Гаврилова Инна Семеновна | Проректор по развитию комплекса университета и социальным вопросам | 125993, г. Москва, Волоколамское шоссе, д.4, каб.214 | ссылка | [email protected] | |
| 5. Проректор по экономике и финансам | Горелов Борис Алексеевич | Проректор по экономике и финансам | 125993, г. Москва, Волоколамское шоссе, д.4, каб.211 | ссылка | [email protected] | |
6. Проректор по безопасности Проректор по безопасности |
Челноков Иван Петрович | Проректор по безопасности | 125993, г. Москва, Волоколамское шоссе, д.4, каб.305 | ссылка | [email protected] | |
| 7. Проректор по стратегическому развитию | Шемяков Александр Олегович | Проректор по стратегическому развитию | 125993, г. Москва, Волоколамское шоссе, д.4, каб.218 | ссылка | [email protected] | |
| 8. Проректор по молодежной политике | КУЛИКОВ СЕРГЕЙ ПАВЛОВИЧ | Проректор по молодежной политике | 125993, г. Москва, Волоколамское шоссе, д.4, каб.214 Москва, Волоколамское шоссе, д.4, каб.214 |
ссылка | [email protected] | |
| Факультеты/Институты/Кафедры | ||||||
| 9. «Институт №2 «»Авиационные, ракетные двигатели и энергетические установки»»» | Монахова Вероника Павловна | директор | 125993, г. Москва, Волоколамское шоссе, д.4 | ссылка | [email protected] | скачать |
| 10. Кафедра 201 | Агульник Алексей Борисович | зав. кафедрой | 125993, г. Москва, Волоколамское шоссе, д.4 | ссылка | kaf201@mai. ru ru |
скачать |
| 11. Кафедра 202 | 125993, г. Москва, Волоколамское шоссе, д.4 | ссылка | [email protected] | скачать | ||
| 12. Кафедра 203 | Равикович Юрий Александрович | зав. кафедрой | 125993, г. Москва, Волоколамское шоссе, д.4 | ссылка | [email protected] | скачать |
| 13. Кафедра 204 | Мякочин Александр Сергеевич | зав. кафедрой кафедрой |
125993, г. Москва, Волоколамское шоссе, д.4 | ссылка | [email protected] | скачать |
| 14. Кафедра 205 | Марчуков Евгений Ювенальевич | зав. кафедрой | 125993, г. Москва, Волоколамское шоссе, д.4 | ссылка | [email protected] | скачать |
| 15. Кафедра 207 | Монахова Вероника Павловна | зав. кафедрой | 125993, г. Москва, Волоколамское шоссе, д.4 | ссылка | kaf207@mai. ru ru |
скачать |
| 16. Кафедра 208 | Назаренко Игорь Петрович | зав. кафедрой | 125993, г. Москва, Волоколамское шоссе, д.4 | ссылка | [email protected] | скачать |
| 17. «Институт №3 «»Системы управления, информатика и электроэнергетика»»» | Следков Юрий Германович | директор | 125993, г. Москва, Волоколамское шоссе, д.4 | ссылка | [email protected] | скачать |
18. кафедра 301 кафедра 301 |
Желтов Сергей Юрьевич | зав. кафедрой | 125993, г. Москва, Волоколамское шоссе, д.4 | ссылка | [email protected] | скачать |
| 19. кафедра 304 | Брехов Олег Михайлович | зав. кафедрой | 125993, г. Москва, Волоколамское шоссе, д.4 | ссылка | скачать | |
| 20. кафедра 305 | Алешин Борис Сергеевич | зав. кафедрой | 125993, г. Москва, Волоколамское шоссе, д. 4 4 |
ссылка | [email protected] | скачать |
| 21. кафедра 306 | Аверин Сергей Владимирович | зав. кафедрой | 125993, г. Москва, Волоколамское шоссе, д.4 | ссылка | [email protected] | скачать |
| 22. кафедра 307 | Васильев Федор Владимирович | зав. кафедрой | 125993, г. Москва, Волоколамское шоссе, д.4 | ссылка | [email protected] | скачать |
23. кафедра 308 кафедра 308 |
Шаронов Анатолий Васильевич | зав. кафедрой | 125993, г. Москва, Волоколамское шоссе, д.4 | ссылка | [email protected] | скачать |
| 24. кафедра 309 | Кириллов Владимир Юрьевич | зав. кафедрой | 125993, г. Москва, Волоколамское шоссе, д.4 | ссылка | [email protected] | скачать |
| 25. кафедра 310 | Ковалев Константин Львович | зав. кафедрой | 125993, г. Москва, Волоколамское шоссе, д. 4 4 |
ссылка | [email protected] | скачать |
| 26. Кафедра 311 | Вестяк Владимир Анатольевич | зав. кафедрой | 125993, г. Москва, Волоколамское шоссе, д.4 | ссылка | [email protected] | скачать |
| 27. кафедра 312Б | Шишанов Анатолий Васильевич | зав. кафедрой | ссылка | скачать | ||
28. кафедра 314Б кафедра 314Б |
Медведев Владимир Михайлович | зав. кафедрой | ссылка | скачать | ||
| 29. Кафедра 317 | БЕНДЕРСКИЙ ГЕННАДИЙ ПЕТРОВИЧ | зав. кафедрой | 125993, г. Москва, Волоколамское шоссе, д.4 | ссылка | [email protected] | скачать |
| 30. Кафедра 316 | ХОРОШКО ЛЕОНИД ЛЕОНИДОВИЧ | зав. кафедрой | 125993, г. Москва, Волоколамское шоссе, д.4 | ссылка | kaf316@mai. ru ru |
скачать |
| 31. Кафедра 315 | Калачанов Вячеслав Дмитриевич | зав. кафедрой | 125993, г. Москва, Волоколамское шоссе, д.4 | ссылка | скачать | |
| 32. «Институт №4 «»Радиоэлектроника, инфокоммуникации и информационная безопасность»»» | Кирдяшкин Владимир Владимирович | директор | 125993, г. Москва, Волоколамское шоссе, д.4 | ссылка | [email protected] | скачать |
33. Кафедра 402 Кафедра 402 |
Мазепа Роман Богданович | зав. кафедрой | 125993, г. Москва, Волоколамское шоссе, д.4 | ссылка | скачать | |
| 34. Кафедра 404 | Ушкар Михаил Николаевич | зав. кафедрой | 125993, г. Москва, Волоколамское шоссе, д.4 | ссылка | [email protected] | скачать |
| 35. Кафедра 405 | Кузнецов Юрий Владимирович | зав. кафедрой | 125993, г. Москва, Волоколамское шоссе, д. 4 4 |
ссылка | [email protected] | скачать |
| 36. Кафедра 406 | Воскресенский Дмитрий Иванович | зав. кафедрой | 125993, г. Москва, Волоколамское шоссе, д.4 | ссылка | [email protected] | скачать |
| 37. Кафедра 408 | Шевцов Вячеслав Алексеевич | зав. кафедрой | 125993, г. Москва, Волоколамское шоссе, д.4 | ссылка | скачать | |
38. Кафедра 409Б Кафедра 409Б |
Стрельчук Сергей Григорьевич | зав. кафедрой | ссылка | скачать | ||
| 39. Кафедра 416Б | ссылка | скачать | ||||
| 40. Кафедра 410 | Канащенков Анатолий Иванович | зав. кафедрой | 125993, г. Москва, Волоколамское шоссе, д.4 | ссылка | скачать | |
41. Институт инженерной экономики и гуманитарных наук Институт инженерной экономики и гуманитарных наук |
Новиков Сергей Вячеславович | 125993, г. Москва, Волоколамское шоссе, д.4 | ссылка | [email protected] | скачать | |
| 42. Кафедра 515 | КУЛИКОВ СЕРГЕЙ ПАВЛОВИЧ | 125993, г. Москва, Волоколамское шоссе, д.4 | ссылка | скачать | ||
| 43. Кафедра 514 | Латышева Валентина Васильевна | зав. кафедрой | 125993, г. Москва, Волоколамское шоссе, д. 4 4 |
ссылка | [email protected] | скачать |
| 44. Кафедра 518 | Вельможко Ирина Николаевна | зав. кафедрой | 125993, г. Москва, Волоколамское шоссе, д.4 | ссылка | скачать | |
| 45. Кафедра 517 | Крянев Юрий Витальевич | зав. кафедрой | 125993, г. Москва, Волоколамское шоссе, д.4 | ссылка | [email protected] | скачать |
46. Кафедра 519 Кафедра 519 |
Краев Юрий Валериевич | зав. кафедрой | 125993, г. Москва, Волоколамское шоссе, д.4 | ссылка | скачать | |
| 47. Кафедра 516 | ТЕПЛЫШЕВ ВЯЧЕСЛАВ ЮРЬЕВИЧ | зав. кафедрой | 125993, г. Москва, Волоколамское шоссе, д.4 | ссылка | скачать | |
| 48. Кафедра 501 | ГОЛОВ РОМАН СЕРГЕЕВИЧ | зав. кафедрой | 125993, г. Москва, Волоколамское шоссе, д.4 | ссылка | kaf501@mai. ru ru |
скачать |
| 49. Кафедра 502 | Чайка Надежда Кирилловна | зав. кафедрой | 125993, г. Москва, Волоколамское шоссе, д.4 | ссылка | [email protected] | скачать |
| 50. кафедра 505 | Горелов Борис Алексеевич | зав. кафедрой | 125993, г. Москва, Волоколамское шоссе, д.4 | ссылка | [email protected] | скачать |
| 51. кафедра 507 | 125993, г. Москва, Волоколамское шоссе, д.4 Москва, Волоколамское шоссе, д.4 |
ссылка | [email protected] | скачать | ||
| 52. кафедра 509 | Корунов Станислав Сергеевич | зав. кафедрой | 125993, г. Москва, Волоколамское шоссе, д.4 | ссылка | [email protected] | скачать |
| 53. Кафедра 510Б | Гордеенко Анатолий Михайлович | зав. кафедрой | ссылка | [email protected] | скачать | |
54. кафедра 511Б кафедра 511Б |
Демченко Олег Федорович | зав. кафедрой | ссылка | скачать | ||
| 55. кафедра 512 | Тихонов Алексей Иванович | зав. кафедрой | 125993, г. Москва, Волоколамское шоссе, д.4 | ссылка | скачать | |
| 56. «Институт №6 «»Аэрокосмический»»» | Тушавина Ольга Валериановна | директор | 125993, г. Москва, Волоколамское шоссе, д.4 | ссылка | dekan6@mai. ru ru |
скачать |
| 57. Кафедра 614 | Сорокин Андрей Евгениевич | зав. кафедрой | 125993, г. Москва, Волоколамское шоссе, д.4 | ссылка | [email protected] | скачать |
| 58. Кафедра 601 | Алифанов Олег Михайлович | зав. кафедрой | 125993, г. Москва, Волоколамское шоссе, д.4 | ссылка | скачать | |
| 59. Кафедра 602 | Туркин Игорь Константинович | зав. кафедрой кафедрой |
125993, г. Москва, Волоколамское шоссе, д.4 | ссылка | [email protected] | скачать |
| 60. Кафедра 604 | Малышев Вениамин Васильевич | зав. кафедрой | 125993, г. Москва, Волоколамское шоссе, д.4 | ссылка | [email protected] | скачать |
| 61. Кафедра 608 | Сорокин Владимир Алексеевич | зав. кафедрой | 125993, г. Москва, Волоколамское шоссе, д.4 | ссылка | kaf608@mai. ru ru |
скачать |
| 62. Кафедра 609 | Падалко Сергей Николаевич | зав. кафедрой | 125993, г. Москва, Волоколамское шоссе, д.4 | ссылка | [email protected] | скачать |
| 63. Кафедра 610 | Макаров Юрий Николаевич | зав. кафедрой | 125993, г. Москва, Волоколамское шоссе, д.4 | ссылка | [email protected] | скачать |
| 64. Кафедра 611Б | Матюшин Максим Михайлович | зав. кафедрой кафедрой |
ссылка | скачать | ||
| 65. Институт общеинженерной подготовки | Рабинский Лев Наумович | директор | 125993, г. Москва, Волоколамское шоссе, д.4 | ссылка | [email protected] | скачать |
| 66. Кафедра 902 | Тарлаковский Дмитрий Валентинович | зав. кафедрой | 125993, г. Москва, Волоколамское шоссе, д.4 | ссылка | [email protected] | скачать |
67. Кафедра 903 Кафедра 903 |
Рабинский Лев Наумович | зав. кафедрой | 125993, г. Москва, Волоколамское шоссе, д.4 | ссылка | [email protected] | скачать |
| 68. Кафедра 904 | Куприков Михаил Юрьевич | зав. кафедрой | 125993, г. Москва, Волоколамское шоссе, д.4 | ссылка | [email protected] | скачать |
| 69. Кафедра 906 | Фирсанов Валерий Васильевич | зав. кафедрой | 125993, г. Москва, Волоколамское шоссе, д. 4 4 |
ссылка | [email protected] | скачать |
| 70. Кафедра 908 | Фармаковская Ариадна Алексеевна | зав. кафедрой | 125993, г. Москва, Волоколамское шоссе, д.4 | ссылка | скачать | |
| 71. Кафедра 909 Б | Левитан Борис Аркадьевич | зав. кафедрой | ссылка | [email protected] | скачать | |
72. Кафедра 910 Б Кафедра 910 Б |
Данилин Александр Николаевич | зав. кафедрой | ссылка | скачать | ||
| 73. 912Б кафедра | Пузин Сергей Никифорович | зав. кафедрой | ссылка | [email protected] | скачать | |
| 74. Институт иностранных языков | Каллиопин Александр Константинович | директор | 125993, г. Москва, Волоколамское шоссе, д.4 | ссылка | скачать | |
75. Кафедра И-15 Кафедра И-15 |
Уколова Лидия Евгеньевна | зав. кафедрой | 125993, г. Москва, Волоколамское шоссе, д.4 | ссылка | скачать | |
| 76. Кафедра И-11 | Коротаева Ирина Эдуардовна | зав. кафедрой | 125993, г. Москва, Волоколамское шоссе, д.4 | ссылка | [email protected] | скачать |
| 77. Кафедра И-12 | Аникеева Ирина Годерзовна | зав. кафедрой | 125993, г. Москва, Волоколамское шоссе, д. 4 4 |
ссылка | скачать | |
| 78. Кафедра И-13 | Вечеринина Елена Алексеевна | зав. кафедрой | 125993, г. Москва, Волоколамское шоссе, д.4 | ссылка | скачать | |
| 79. Кафедра И-14 | АРТЮШИНА ГАЛИНА ГЕОРГИЕВНА | зав. кафедрой | 125993, г. Москва, Волоколамское шоссе, д.4 | ссылка | скачать | |
80. Институт материаловедения и технологий материалов Институт материаловедения и технологий материалов |
БЕСПАЛОВ АЛЕКСАНДР ВЛАДИМИРОВИЧ | директор | 121552, г. Москва, ул. Оршанская, д.3 | ссылка | [email protected] | скачать |
| 81. «Кафедра «»Материаловедение и технология обработки материалов»»» | ИЛЬИН АЛЕКСАНДР АНАТОЛЬЕВИЧ | зав. кафедрой | 121552, г. Москва, ул. Оршанская, д.3 | ссылка | скачать | |
| 82. «Кафедра «»Технологии и системы автоматизированного проектирования металлургических процессов»»» | МОИСЕЕВ ВИКТОР СЕРГЕЕВИЧ | зав. кафедрой кафедрой |
121552, г. Москва, ул. Оршанская, д.3 | ссылка | скачать | |
| 83. «Кафедра «»Природная и техногенная безопасность и управление риском»»» | 121552, г. Москва, ул. Оршанская, д.3 | ссылка | скачать | |||
| 84. «Кафедра «»Управление качеством и сертификация»»» | ВАСИЛЬЕВ ВИКТОР АНДРЕЕВИЧ | зав. кафедрой | 121552, г. Москва, ул. Оршанская, д.3 | ссылка | скачать | |
85. «Кафедра «»Технология композиционных материалов, конструкций и микросистем»»» «Кафедра «»Технология композиционных материалов, конструкций и микросистем»»» |
БАБАЕВСКИЙ ПЕТР ГОРДЕЕВИЧ | зав. кафедрой | Институт материаловедения и технологий материалов | ссылка | скачать | |
| 86. «Кафедра «»Авиационные конструкции из композиционных материалов»» (на базе ФГУП «»ЦАГИ»»)» | КОВАЛЕВ ИГОРЬ ЕВГЕНЬЕВИЧ | зав. кафедрой | 121552, г. Москва, ул. Оршанская, д.3 | ссылка | скачать | |
| 87. «Кафедра «»Физика конструкционных материалов»»» | БЕКЛЕМИШЕВ НИЛ НИЛОВИЧ | зав. кафедрой кафедрой |
121552, г. Москва, ул. Оршанская, д.3 | ссылка | скачать | |
| 88. «Институт «»Аэрокосмические наукоемкие технологии и производства»»» | ИОСИФОВ ПАВЕЛ АНДРЕЕВИЧ | директор | Москва, Берниковская наб., д. 14 | ссылка | [email protected] | скачать |
| 89. «Кафедра «»Технология испытаний и эксплуатации»»» | БАХВАЛОВ ЮРИЙ ОЛЕГОВИЧ | зав. кафедрой | ссылка | скачать | ||
90. «Кафедра «»Радиоэлектроника, телекоммуникации и нанотехнологии»»» «Кафедра «»Радиоэлектроника, телекоммуникации и нанотехнологии»»» |
СЛЕПЦОВ ВЛАДИМИР ВЛАДИМИРОВИЧ | зав. кафедрой | ссылка | скачать | ||
| 91. «Кафедра «»Стартовые комплексы»»» | ТОРПАЧЕВ АЛЕКСАНДР ВИКТОРОВИЧ | зав. кафедрой | ссылка | скачать | ||
| 92. «Кафедра «»Технология производства и эксплуатации двигателей летательных аппаратов»»» | БОЙЦОВ АЛЕКСЕЙ ГЕОРГИЕВИЧ | зав. кафедрой | ссылка | скачать | ||
93. «Кафедра «»Технология производства приборов и информационных систем управления летательных аппаратов»»» «Кафедра «»Технология производства приборов и информационных систем управления летательных аппаратов»»» |
Жуков Андрей Александрович | зав. кафедрой | ссылка | скачать | ||
| 94. «Кафедра «»Технология производства летательных аппаратов»»» | КОВАЛЕВИЧ МИХАИЛ ВЛАДИМИРОВИЧ | зав. кафедрой | ссылка | скачать | ||
| 95. Факультет №1 | Ефремов Александр Викторович | декан | 125993, г. Москва, Волоколамское шоссе, д.4 Москва, Волоколамское шоссе, д.4 |
ссылка | [email protected] | скачать |
| 96. кафедра 101 | Погосян Михаил Асланович | зав. кафедрой | 125993, г. Москва, Волоколамское шоссе, д.4 | ссылка | [email protected] | скачать |
| 97. кафедра 102 | Игнаткин Юрий Михайлович | зав. кафедрой | 125993, г. Москва, Волоколамское шоссе, д.4 | ссылка | [email protected] | скачать |
98. кафедра 104 кафедра 104 |
Долгов Олег Сергеевич | зав. кафедрой | 125993, г. Москва, Волоколамское шоссе, д.4 | ссылка | [email protected] | скачать |
| 99. кафедра 105 | 125993, г. Москва, Волоколамское шоссе, д.4 | ссылка | [email protected] | скачать | ||
| 100. кафедра 106 | Ефремов Александр Викторович | зав. кафедрой | 125993, г. Москва, Волоколамское шоссе, д.4 | ссылка | скачать | |
101. кафедра 107Б кафедра 107Б |
Жеребин Александр Михайлович | зав. кафедрой | ссылка | [email protected] | скачать | |
| 102. кафедра 109Б | Пелипенко Михаил Иванович | зав. кафедрой | ссылка | скачать | ||
| 103. Факультет №7 | Тихонов Константин Михайлович | декан | 125993, г. Москва, Волоколамское шоссе, д.4 | ссылка | dekan7@mai. ru ru |
скачать |
| 104. Кафедра 701 | Обносов Борис Викторович | зав. кафедрой | 125993, г. Москва, Волоколамское шоссе, д.4 | ссылка | [email protected] | скачать |
| 105. Кафедра 702 | Степанов Вилен Степанович | зав. кафедрой | 125993, г. Москва, Волоколамское шоссе, д.4 | ссылка | [email protected] | скачать |
| 106. Кафедра 703 | Неретин Евгений Сергеевич | зав. кафедрой кафедрой |
125993, г. Москва, Волоколамское шоссе, д.4 | ссылка | [email protected] | скачать |
| 107. Кафедра 704 | Евдокименков Вениамин Николаевич | зав. кафедрой | 125993, г. Москва, Волоколамское шоссе, д.4 | ссылка | [email protected] | скачать |
| 108. Кафедра 705Б | Сыров Анатолий Сергеевич | зав. кафедрой | ссылка | [email protected] | скачать | |
109. Факультет №8 Факультет №8 |
Крылов Сергей Сергеевич | декан | 125993, г. Москва, Волоколамское шоссе, д.4 | ссылка | [email protected] | скачать |
| 110. кафедра 813 | ДЕНИСОВА ИРИНА ПАВЛОВНА | зав. кафедрой | 125993, г. Москва, Волоколамское шоссе, д.4 | ссылка | [email protected] | скачать |
| 111. Кафедра 812 | КОСТИКОВ ЮРИЙ АЛЕКСАНДРОВИЧ | зав. кафедрой | 125993, г. Москва, Волоколамское шоссе, д. 4 4 |
ссылка | [email protected] | скачать |
| 112. Кафедра 801 | Ципенко Антон Владимирович | зав. кафедрой | 125993, г. Москва, Волоколамское шоссе, д.4 | ссылка | [email protected] | скачать |
| 113. кафедра 802 | Бардин Борис Сабирович | зав. кафедрой | 125993, г. Москва, Волоколамское шоссе, д.4 | ссылка | [email protected] | скачать |
114. кафедра 804 кафедра 804 |
Кибзун Андрей Иванович | зав. кафедрой | 125993, г. Москва, Волоколамское шоссе, д.4 | ссылка | [email protected] | скачать |
| 115. кафедра 805 | Пантелеев Андрей Владимирович | зав. кафедрой | 125993, г. Москва, Волоколамское шоссе, д.4 | ссылка | [email protected] | скачать |
| 116. кафедра 806 | Крылов Сергей Сергеевич | зав. кафедрой | 125993, г. Москва, Волоколамское шоссе, д. 4 4 |
ссылка | скачать | |
| 117. Кафедра 808Б | Илющенко Валерий Васильевич | зав. кафедрой | ссылка | скачать | ||
| 118. Кафедра 811 | Красильников Павел Сергеевич | зав. кафедрой | 125993, г. Москва, Волоколамское шоссе, д.4 | ссылка | [email protected] | скачать |
| 119. кафедра 810Б | Абгарян Каринэ Карленовна | зав. кафедрой кафедрой |
ссылка | скачать | ||
| 120. Военный институт МАИ | Гончаренко Владимир Иванович | директор на правах факультета | ссылка | скачать | ||
| Иные структурные подразделения | ||||||
| 121. Управление кадрового, правового и документационного обеспечения УКПДО | Сорокин Андрей Евгениевич | начальник управления | скачать | |||
122. Юридический отдел Юридический отдел |
Васильев Максим Валерьевич | начальник | скачать | |||
| 123. Отдел кадров студентов | Борбасова Маргарита Станиславовна | начальник отдела | ||||
| 124. Отдел кадров работников | Носова Ольга Васильевна | начальник отдела | скачать | |||
125. Общий отдел Общий отдел |
скачать | |||||
| 126. Отдел охраны труда и экологии | Печерица Анатолий Васильевич | начальник | скачать | |||
| 127. Отдел распорядительных документов | Попова Марина Анатольевна | начальник | ||||
128. Объединенный архив Объединенный архив |
Дмитриева Ольга Викторовна | заведующий архивом | ||||
| «Институт №2 «»Авиационные, ракетные двигатели и энергетические установки»»» | ||||||
| 129. «Дирекция Института №2 «»Авиационные, ракетные двигатели и энергетические установки»»» | Монахова Вероника Павловна | директор | 125993, г. Москва, Волоколамское шоссе, д.4 | ссылка | [email protected] | |
| «Институт №3 «»Системы управления, информатика и электроэнергетика»»» | ||||||
130. «Дирекция Института №3 «»Системы управления, информатика и электроэнергетика»»» «Дирекция Института №3 «»Системы управления, информатика и электроэнергетика»»» |
Следков Юрий Германович | директор | 125993, г. Москва, Волоколамское шоссе, д.4 | ссылка | [email protected] | |
| «Институт №4 «»Радиоэлектроника, инфокоммуникации и информационная безопасность»»» | ||||||
| 131. «Дирекция Института №4 «»Радиоэлектроника, инфокоммуникации и информационная безопасность»»» | Кирдяшкин Владимир Владимирович | директор | 125993, г. Москва, Волоколамское шоссе, д.4 | ссылка | [email protected] | |
| Институт инженерной экономики и гуманитарных наук | ||||||
132. Дирекция Института инженерной экономики и гуманитарных наук Дирекция Института инженерной экономики и гуманитарных наук |
Новиков Сергей Вячеславович | 125993, г. Москва, Волоколамское шоссе, д.4 | ссылка | [email protected] | ||
| «Институт №6 «»Аэрокосмический»»» | ||||||
| 133. «Дирекция Института №6 «»Аэрокосмический»»» | Тушавина Ольга Валериановна | директор | 125993, г. Москва, Волоколамское шоссе, д.4 | ссылка | [email protected] | |
| Институт общеинженерной подготовки | ||||||
134. Дирекция Института общеинженерной подготовки Дирекция Института общеинженерной подготовки |
Рабинский Лев Наумович | директор | 125993, г. Москва, Волоколамское шоссе, д.4 | ссылка | [email protected] | |
| Институт иностранных языков | ||||||
| 135. Дирекция Института иностранных языков | Каллиопин Александр Константинович | директор | 125993, г. Москва, Волоколамское шоссе, д.4 | ссылка | ||
| Институт материаловедения и технологий материалов | ||||||
136. Дирекция института материаловедения и технологий материалов Дирекция института материаловедения и технологий материалов |
БЕСПАЛОВ АЛЕКСАНДР ВЛАДИМИРОВИЧ | директор | 121552, г. Москва, ул. Оршанская, д.3 | ссылка | ||
| «Институт «»Аэрокосмические наукоемкие технологии и производства»»» | ||||||
| 137. «Дирекция института «»Аэрокосмические наукоемкие технологии и производства»»» | ИОСИФОВ ПАВЕЛ АНДРЕЕВИЧ | директор | ссылка | |||
| Проректор по учебной работе | ||||||
138. Управление довузовской подготовки Управление довузовской подготовки |
Гетманов Александр Георгиевич | начальник управления | ул. Дубосековская, д.4, ГУК, зона ?А?, каб. 403, 414 | ссылка | [email protected] | |
| 139. Научно-техническая библиотека | Медовая Ирина Сергеевна | директор НТБ | 125993, г. Москва, Волоколамское шоссе, д.4 | ссылка | [email protected] | |
| 140. РЦ НИИТ | Качалин Анатолий Михайлович | директор | 125993, г. Москва, Волоколамское шоссе, д.4 Москва, Волоколамское шоссе, д.4 |
ссылка | [email protected] | |
| 141. Управление методического обеспечения образовательной деятельности (УМО ОД) | Долгова Елена Александровна | заместитель начальника управления | 125993, г. Москва, Волоколамское шоссе, д.4 | ссылка | [email protected] | скачать |
| 142. Учебное управление (УУП) | Слесарев Александр Владимирович | начальник управления | 125993, г. Москва, Волоколамское шоссе, д.4 | ссылка | abc@mai. ru ru |
|
| 143. Физико-математическая школа МАИ | Пегачкова Елена Александровна | директор | 125993, г. Москва, Волоколамское шоссе, д.4 | ссылка | ||
| 144. Учебно-авиационная база МАИ | Кожевников Евгений Владимирович | начальник авиационной базы | ссылка | [email protected] | ||
| 145. Управление дополнительного профессионального образования | Быков Леонид Владимирович | начальник управления | 125993, г. Москва, Волоколамское шоссе, д.4 Москва, Волоколамское шоссе, д.4 |
ссылка | [email protected] | |
| 146. Отдел сетевых образовательных программ и мониторинга | Чиликин Игорь Николаевич | начальник | 125993, г. Москва, Волоколамское шоссе, д.4 | ссылка | ||
| 147. Управление поддержки и мониторинга электронного обучения | УХОВ ПЕТР АЛЕКСАНДРОВИЧ | начальник управления | 125993, г. Москва, Волоколамское шоссе, д.4 | ссылка | [email protected] | скачать |
| Проректор по научной работе | ||||||
148. Отдел Ученого и диссертационных советов Отдел Ученого и диссертационных советов |
Аникина Татьяна Алексеевна | 125993, г. Москва, Волоколамское шоссе, д.4 | ссылка | [email protected] | скачать | |
| 149. Отдел аспирантуры и докторантуры | Владимирова Галина Анатольевна | заведующий отделом | 125993, г. Москва, Волоколамское шоссе, д.4 | ссылка | [email protected] | |
| 150. НИЦ НТ МАИ | Карпышев Александр Владимирович | директор центра | 125993, г. Москва, Волоколамское шоссе, д.4 Москва, Волоколамское шоссе, д.4 |
ссылка | [email protected] | |
| 151. ЭОЗ | Сергеев Николай Брониславович | 125993, г. Москва, Волоколамское шоссе, д. 4, корп. 9, комната 405 | ссылка | |||
| 152. Ресурсный центр коллективного пользования | 121552, г. Москва, ул. Оршанская, д.3 | ссылка | [email protected] | |||
153. Научно-организационное управление (НОУ) Научно-организационное управление (НОУ) |
Терентьев Вадим Васильевич | начальник управления | 125993, г. Москва, Волоколамское шоссе, д.4 | ссылка | [email protected] | |
| 154. Управление научных программ и проектов (УНПП) | Замковой Андрей Анатольевич | начальник управления | 125993, г. Москва, Волоколамское шоссе, д.4 | ссылка | [email protected] | |
| Проректор по развитию комплекса университета и социальным вопросам | ||||||
| 155. Управление Материально-технического обеспечения (УМТО) | Федюнин Михаил Николаевич | начальник управления | 125993, г. Москва, Волоколамское шоссе, д.4 Москва, Волоколамское шоссе, д.4 |
ссылка | ||
| 156. Управление по эксплуатации и ремонту (УЭР) | Дягилев Евгений Владимирович | начальник управления | 125993, г. Москва, Волоколамское шоссе, д.4 | ссылка | ||
| 157. Управление по эксплуатации и развитию загородных баз (УЭРЗБ) | Денисов Евгений Павлович | начальник управления | 125993, г. Москва, Волоколамское шоссе, д.4 | ссылка | [email protected] | |
158. Управление по развитию и эксплуатации социально-бытового комплекса Управление по развитию и эксплуатации социально-бытового комплекса |
Баглюкова Ольга Евгеньевна | начальник управления | Москва, ул. Дубосековская, д. 5, каб. 220 | ссылка | скачать | |
| 159. Столовая МАИ | Бурмистрова Ирина Хазритовна | директор | Г. Москва, ул. Константина Царева, дом, 16, 2 этаж | ссылка | [email protected] | скачать |
| 160. Детские ясли | Ковалева Надежда Валентиновна | заведующий детскими яслями | Г. Москва, Волоколамское шоссе, д. 14Б Москва, Волоколамское шоссе, д. 14Б |
ссылка | скачать | |
| 161. Управление капитального строительства | Михайлин Алексей Михайлович | начальник управления | 125993, г. Москва, Волоколамское шоссе, д.4 | ссылка | [email protected] | скачать |
| 162. Отдел слаботочного оборудования | Шмелев Валентин Сергеевич | начальник отдела | 125993, г. Москва, Волоколамское шоссе, д.4 | ссылка | осо@mai.ru | скачать |
| Проректор по экономике и финансам | ||||||
163. Управление внутреннего контроля Управление внутреннего контроля |
Тюгаева Марина Александровна | начальник управления | 125993, г. Москва, Волоколамское шоссе, д.4 | ссылка | ||
| 164. Управление информационных систем | Попов Сергей Сергеевич | начальник управления | 125993, г. Москва, Волоколамское шоссе, д.4 | ссылка | [email protected] | скачать |
| 165. УФУ и ФК | Коржуева Людмила Михайловна | начальник УФУ и ФК — главный бухгалтер | 125993, г. Москва, Волоколамское шоссе, д.4 Москва, Волоколамское шоссе, д.4 |
ссылка | [email protected] | скачать |
| 166. УЭФ | Бойцова Галина Валерьевна | начальник управления | 125993, г. Москва, Волоколамское шоссе, д.4 | ссылка | [email protected] | |
| 167. УРИО | Розанов Владислав Владиславович | начальник управления | 125993, г. Москва, Волоколамское шоссе, д.4 | ссылка | ||
| Проректор по безопасности | ||||||
168. Первый отдел Первый отдел |
Никитина Наталья Владиленовна | начальник отдела | 125993, г. Москва, Волоколамское шоссе, д.4 | ссылка | [email protected] | |
| 169. Штаб ГОЧС | Пустовалов Геннадий Иванович | помощник ректора — начальник Штаба ГОЧС | 125993, г. Москва, Волоколамское шоссе, д.4 | ссылка | [email protected] | |
| 170. Отдел пожарной безопасности | Прохоров Андрей Вячеславович | начальник | 125993, г. Москва, Волоколамское шоссе, д.4 Москва, Волоколамское шоссе, д.4 |
ссылка | [email protected] | скачать |
| 171. Дворец культуры и техники | Иошин Сергей Александрович | директор ДКиТ | Москва, ул. Дубосековская д. 4а стр. 1 | ссылка | [email protected] | скачать |
| 172. 1 отдел | Никитина Наталья Владиленовна | начальник отдела | 125993, г. Москва, Волоколамское шоссе, д.4 | ссылка | [email protected] | |
173. 2 управление 2 управление |
Паринов Валерий Николаевич | начальник 2 управления | 125993, г. Москва, Волоколамское шоссе, д.4 | ссылка | [email protected] | |
| 174. 3 отдел | Петухов Олег Витальевич | начальник | 125993, г. Москва, Волоколамское шоссе, д.4 | ссылка | [email protected] | |
| 175. ОАСО | Русанов Дмитрий Валерьевич | начальник | 125993, г. Москва, Волоколамское шоссе, д.4 | ссылка | dima. [email protected] [email protected] |
|
| 176. 4 отдел | Нежинский Евгений Геннадьевич | начальник отдела | 125993, г. Москва, Волоколамское шоссе, д.4 | ссылка | ||
| Проректор по стратегическому развитию | ||||||
| 177. «Центр «»Детский технопарк «»Траектория взлета»»» | Ершов Сергей Александрович | 125993, г. Москва, Волоколамское шоссе, д.4 | ссылка | [email protected] | ||
178. «Управление «»IT-Центр»»» «Управление «»IT-Центр»»» |
Булакина Мария Борисовна | начальник управления | 125993, г. Москва, Волоколамское шоссе, д.4 | ссылка | [email protected] | |
| 179. «Центр «»Сервис высокотехнологичной продукции»»» | Патраков Андрей Григорьевич | директор центра | 125993, г. Москва, Волоколамское шоссе, д. 4 | ссылка | ||
| 180. Управление международной деятельности | Погосян Ольга Михайловна | начальник управления | 125993, г. Москва, Волоколамское шоссе, д.4 Москва, Волоколамское шоссе, д.4 |
ссылка | [email protected] | |
| 181. Управление инноваций, стратегии и коммуникаций (УИСК) | Шемяков Александр Олегович | исполняющий обязанности начальника управления | 125993, г. Москва, Волоколамское шоссе, д.4 | ссылка | [email protected] | |
| Проректор по молодежной политике | ||||||
| 182. «УСК «»Наука»» «»МАИ»»» | Межов Михаил Викторович | директор | 125993, г. Москва, Волоколамское шоссе, д.4 | ссылка | usk-nauka@mai. ru ru |
|
| 183. Студенческий культурный центр | ул. Вилиса Лациса, д. 16 | ссылка | [email protected] | |||
| 184. Управление по молодежной политике | ВЕРГУЗЬ АЛЕКСАНДР СЕРГЕЕВИЧ | начальник управления | 125993, г. Москва, Волоколамское шоссе, д.4 | ссылка | ||
| 185. Отдел льготного и материального обеспечения обучающихся | ХЕРСОНЕЦ НИКОЛАЙ СЕРГЕЕВИЧ | начальник отдела | 125993, г. Москва, Волоколамское шоссе, д.4 Москва, Волоколамское шоссе, д.4 |
ссылка | [email protected] | скачать |
| Факультет №7 | ||||||
| 186. Деканат факультета 7 | Тихонов Константин Михайлович | декан | 125993, г. Москва, Волоколамское шоссе, д.4 | ссылка | [email protected] | |
| Факультет №8 | ||||||
| 187. Деканат факультета 8 | Крылов Сергей Сергеевич | декан | 125993, г. Москва, Волоколамское шоссе, д.4 | ссылка | dekan8@mai. ru ru |
|
| БИТ вид подразделения | ||||||
Филиал «Аэронавигация Северо-Восточной Сибири, г. Якутск
Пискунов Вадим Вячеславович
+7 (4112) 49-64-58
+7 (4112) 49-64-59 ф. (+6ч)
Директор филиала
Для решения производственных задач предприятие располагает более чем 1 000 единиц различного радиотехнического оборудования. Это аэродромные и трассовые радиолокаторы, системы радионавигации и средства воздушной и наземной электросвязи.
Наличие необходимого уровня технической оснащенности предприятия, высококвалифицированных кадров позволило в 1999 году начать полеты по кроссполярным маршрутам, соединяющим Северо-Американский континент со странами Юго-Восточной Азии по кратчайшему расстоянию. Открытие регулярных полетов по указанным трассам создает хорошие предпосылки для развития производственных сил территорий не только за счет привлечения иностранных инвестиций, но и за счет международной кооперации в разделении.
Открытие регулярных полетов по указанным трассам создает хорошие предпосылки для развития производственных сил территорий не только за счет привлечения иностранных инвестиций, но и за счет международной кооперации в разделении.
Основной состав работников – это диспетчерский состав служб движения филиалов и отделений и инженерно-технический состав баз ЭРТОС.
Мы гордимся тем, что располагаем высококвалифицированными кадрами. Более 70% диспетчерского состава служб ОВД и специалистов радиотехнического оборудования и связи – первоклассные специалисты.
История деятельности Филиала «Аэронавигация Северо-Восточной Сибири» ФГУП «Госкорпорация по ОрВД» (более раннее название – ГУП «Сахааэроконтроль») начинается в годы послевоенного хозяйственного подъема и бурного развития гражданской авиации Якутии. Именно тогда была создана основная структурная схема, сохранившаяся с незначительными изменениями до июля 1994 года, когда государственное предприятие «Сахааэроконтроль» было официально зарегистрировано в Министерстве юстиции Республики Саха (Якутия).
Служба движения Якутского управления гражданской авиации сформирована и начала работать с 1947 года. Первоначально руководство осуществлялось диспетчерской службой (УДС) Якутского управления ГВФ. Первым начальником УДС был Ворогущин Константин Михайлович.
По мере развития авиации республики, открытия регулярных перевозок совершенствовалась структура службы движения. Приказом начальника ГУ ГВФ от 08.07.47 г. №203 была организована Якутская РДС, призванная руководить полетами в пределах своего района. В целях организации и обеспечения оперативного руководства на территории Якутской отдельной авиагруппы ГВФ на всю глубину полетов, приказом командира Якутской отдельной авиагруппы ГВФ от 24.04.57 г. организована УРДС.
Первыми начальниками службы УРДС были Данилов Александр Григорьевич, Вараксин Егор Александрович, Цветков Иван Дмитриевич, Уржумов Иван Михайлович.
С выходом приказов МГА №700 от 1965 года и №100 от 1967 года проводятся работы по совершенствованию организации обеспечения безопасности полетов при УВД, распределению функциональных обязанностей диспетчеров, делению воздушного пространства на зоны ответственности. При Якутском управлении гражданской авиации организуется отдел движения. Значительный вклад в дело совершенствования организации внесли начальники отдела: Данилов Александр Григорьевич, Касаткин Люциан Васильевич, Бабушкин Марк Абрамович.
При Якутском управлении гражданской авиации организуется отдел движения. Значительный вклад в дело совершенствования организации внесли начальники отдела: Данилов Александр Григорьевич, Касаткин Люциан Васильевич, Бабушкин Марк Абрамович.
Выгодное географическое положение Республики Саха (Якутия) предопределяет основные направления развития системы УВД. За годы существования системы складываются основные потоки воздушного движения:
- система транссибирских маршрутов, связывающая страны Европейского континента с Японией и странами Юго-Восточной Азии;
- система трансполярных маршрутов, являющаяся наиболее выгодной при выполнении полётов из стран Юго-Восточной Азии в Северную Европу;
- система кроссполярных маршрутов, связывающая по кратчайшему расстоянию страны Северной Америки со странами Юго-Восточной Азии;
-
система внутренних воздушных трасс, призванная обеспечить перевозку граждан и грузов из европейской части России в регионы Дальневосточного Федерального округа, а также внутриреспубликанские рейсы.

На сегодняшний день общая площадь зон ответственности диспетчерских пунктов филиала составляет 4 061 тыс. кв. км; протяженность зоны обслуживания с запада на восток — 2 325 км, с севера на юг – более 2 540 км, протяженность участков международных трасс: – 58 415 км; внутренних – 31 528 км; местные воздушные линии – 38 609 км.
Обслуживание на воздушных трассах и установленных маршрутах осуществляют 3 РЦ. В районах аэродромов, на местных воздушных линиях и в районах авиационных работ обслуживание воздушного движения осуществляют 26 диспетчерских пунктов (КДП, КДП МВЛ, КДП МВЛ совмещенные с МДП), 3 центра полётной информации (ЦПИ) аэродромов, 1 – МДП, 1 – ДПП, 1 – ДПК, 4 – СДП (ВСДП). Функции планирования осуществляют центр планирования использования воздушного пространства (ЦП ИВП) РЦ ЕС ОрВД Якутск, 8 групп организации планирования воздушного движения (ГОПВД) при органах ОВД аэродромов.
Приоритетной задачей совершенствования структуры воздушного пространства является создание укрупнённого центра ОВД в г. Якутске.
Якутске.
Контакты (+6ч):
Общий отдел, приемная:
Телефон: +7 (4112) 49-64-58
Факс: +7 (4112) 49-64-59
E-mail: [email protected]
Департамент социальной защиты Воронежской области — Организация
Утверждено
постановлением
правительства Воронежской области
от 23.12.2013 N 1132
ПОЛОЖЕНИЕ
О ДЕПАРТАМЕНТЕ СОЦИАЛЬНОЙ ЗАЩИТЫ ВОРОНЕЖСКОЙ ОБЛАСТИ
Список изменяющих документов
(в ред. постановлений правительства Воронежской области от 06.02.2014 N 90,
от 12.12.2014 N 1161, от 25.12.2014 N 1203, от 11.11.2015 N 869,
от 22.03.2016 N 173, от 03.08.2016 N 560, от 21.09.2016 N 700,
от 06.07.2017 N 533, от 17.10.2017 N 794, от 29.11.2017 N 941,
от 14.02.2018 N 151, от 13.08.2018 N 690, от 21.01.2019 N 32,
от 18.03.2019 N 257, от 25.09.2019 N 909, от 28.01.2020 N 62,
от 14.04.2020 N 321, от 02.07.2020 N 611, от 26.08.2020 N 815,
от 03. 12.2020 N 1067, от 25.01.2021 N 25, от 07.06.2021 N 329)
12.2020 N 1067, от 25.01.2021 N 25, от 07.06.2021 N 329)
1. ОБЩИЕ ПОЛОЖЕНИЯ
1.1. Департамент социальной защиты Воронежской области (далее — Департамент) является исполнительным органом государственной власти Воронежской области, обеспечивающим разработку и реализацию государственной политики в сферах социальной поддержки, оказания бесплатной юридической помощи отдельным категориям граждан, социального обслуживания и социальной защиты населения на территории Воронежской области, а также осуществляющим управление в указанных сферах.
1.2. Утратил силу. — Постановление правительства Воронежской области от 02.07.2020 N 611.
1.3. Департамент в своей деятельности руководствуется Конституцией Российской Федерации, федеральными конституционными законами, федеральными законами, указами и распоряжениями Президента Российской Федерации, иными нормативными правовыми актами органов государственной власти Российской Федерации, Уставом Воронежской области, законами Воронежской области, указами губернатора Воронежской области, иными нормативными правовыми актами органов государственной власти Воронежской области, а также настоящим Положением.
1.4. Департамент осуществляет свою деятельность непосредственно и через государственные (казенные, бюджетные и автономные) учреждения, в отношении которых им исполняются функции и полномочия учредителя (далее — подведомственные учреждения).
1.5. Департамент осуществляет свою деятельность во взаимодействии с федеральными органами исполнительной власти, исполнительными органами государственной власти Воронежской области и органами местного самоуправления, иными учреждениями и организациями независимо от формы собственности.
1.5.1. Департамент обеспечивает при реализации своих полномочий приоритет целей и задач по содействию развитию конкуренции на товарных рынках в установленной сфере деятельности.
(п. 1.5.1 введен постановлением правительства Воронежской области от 13.08.2018 N 690)
1.6. Департамент является юридическим лицом, имеет собственные бланки, штампы, печать с изображением герба Воронежской области, имеет самостоятельный баланс и бюджетную смету, может от своего имени приобретать и осуществлять имущественные и неимущественные права, нести обязанности, выступать истцом, ответчиком, третьим лицом и заинтересованным лицом в судах.
1.7. Финансирование расходов на содержание Департамента осуществляется за счет средств областного бюджета, предусматриваемых на финансирование исполнительных органов государственной власти Воронежской области, а также за счет субвенций из федерального бюджета, предусмотренных на исполнение переданных Российской Федерацией полномочий, исполнение которых возложено на Департамент.
1.8. Структура Департамента утверждается губернатором Воронежской области, штатное расписание Департамента утверждается постановлением правительства Воронежской области.
(п. 1.8 в ред. постановления правительства Воронежской области от 26.08.2020 N 815)
1.9. Департамент как исполнительный орган государственной власти издает в пределах своей компетенции правовые и нормативные правовые акты — приказы, которые являются обязательными для исполнения на территории Воронежской области.
1.10. За Департаментом закрепляется имущество Воронежской области на праве оперативного управления.
1.11. Положение о Департаменте утверждается, изменяется постановлением правительства Воронежской области.
1.12. Полное наименование Департамента — департамент социальной защиты Воронежской области, сокращенное наименование Департамента — ДСЗ ВО.
1.13. Юридический адрес и место нахождения Департамента: 394006, г. Воронеж, ул. Ворошилова, дом 14.
2. ОСНОВНЫЕ ЗАДАЧИ ДЕПАРТАМЕНТА
Основными задачами Департамента являются:
2.1. Обеспечение реализации единой государственной политики в сфере социальной защиты, разработка и реализация мероприятий по повышению эффективности социальной поддержки и доступности социального обслуживания отдельных категорий граждан в соответствии с действующим законодательством.
2.2. Формирование и развитие структуры и сети государственной системы учреждений социальной защиты населения.
2.3. Разработка предложений и осуществление мероприятий по повышению эффективности государственного управления в сфере социальной защиты и поддержки населения.
2.4. Обеспечение реализации конституционных прав граждан, их интересов, государственных гарантий в сфере социальной защиты и поддержки населения.
2.5. Организация деятельности по признанию граждан нуждающимися в социальном обслуживании, а также по составлению индивидуальных программ предоставления социальных услуг, координация деятельности поставщиков социальных услуг, общественных организаций и иных организаций, осуществляющих деятельность в сфере социального обслуживания, в Воронежской области.
(п. 2.5 в ред. постановления правительства Воронежской области от 11.11.2015 N 869)
2.6. Повышение эффективности системы социального обслуживания граждан пожилого возраста и инвалидов, семей с детьми, детей, находящихся в трудной жизненной ситуации, и иных категорий граждан в соответствии с действующим законодательством.
2.7. Повышение качества и количества услуг по социальному обслуживанию всех категорий граждан.
2.8. Укрепление социальной защиты семьи, обеспечивающей сохранение ребенка в семье; создание благоприятных условий для комплексного развития и жизнедеятельности детей, попавших в трудную жизненную ситуацию.
3. ОСНОВНЫЕ ФУНКЦИИ И УСЛУГИ ДЕПАРТАМЕНТА
3.1. Департамент исполняет следующие государственные функции:
3.1.1. Формирование и ведение единого списка граждан, имеющих право на меру социальной поддержки в виде предоставления безвозмездной субсидии на приобретение жилого помещения, состоящих на учете в качестве нуждающихся в жилых помещениях на территории Воронежской области, и принятие решения по предоставлению меры социальной поддержки в виде предоставления безвозмездной субсидии на приобретение жилого помещения.
3.1.2. Ведение учета граждан, нуждающихся в предоставлении жилых помещений жилищного фонда Воронежской области социального использования по договорам социального найма, а также принятие решения о предоставлении такого помещения на основании договора социального найма.
3.1.3. Организация и осуществление мер по профилактике безнадзорности и беспризорности несовершеннолетних, а также организация индивидуальной профилактической работы в отношении безнадзорных и беспризорных несовершеннолетних, их родителей или иных законных представителей, не исполняющих своих обязанностей по воспитанию, содержанию несовершеннолетних и (или) отрицательно влияющих на их поведение либо жестоко обращающихся с ними.
(пп. 3.1.3 в ред. постановления правительства Воронежской области от 26.08.2020 N 815)
3.1.4. Исключен. — Постановление правительства Воронежской области от 06.07.2017 N 533.
3.1.5. Разработка и реализация государственных программ Воронежской области в сфере социальной защиты.
(пп. 3.1.5 в ред. постановления правительства Воронежской области от 02.07.2020 N 611)
3.1.6. Согласование стоимости услуг, предоставляемых согласно гарантированному перечню услуг по погребению, определяемой органами местного самоуправления Воронежской области.
3.1.7. Ведение учета граждан, нуждающихся в жилых помещениях специализированного жилищного фонда Воронежской области, а также принятие решения о предоставлении служебного жилого помещения по договору найма.
(в ред. постановления правительства Воронежской области от 02.07.2020 N 611)
3.1.8. Формирование списка детей-сирот и детей, оставшихся без попечения родителей, лиц из числа детей-сирот и детей, оставшихся без попечения родителей, лиц, которые относились к категории детей-сирот и детей, оставшихся без попечения родителей, лиц из числа детей-сирот и детей, оставшихся без попечения родителей, и достигли возраста 23 лет, которые подлежат обеспечению жилыми помещениями.
(пп. 3.1.8 в ред. постановления правительства Воронежской области от 25.09.2019 N 909)
3.1.9. Формирование и утверждение сводного списка граждан, имеющих право быть принятыми в члены жилищно-строительных кооперативов на территории Воронежской области, создаваемых в целях обеспечения жильем граждан в соответствии с Федеральным законом «О содействии развитию жилищного строительства».
3.1.10. Ведение областного регистра лиц, имеющих право на получение социальной поддержки, в соответствии с действующим областным законодательством.
3.1.11. Принятие на учет и ведение учета государственных гражданских служащих Воронежской области для предоставления единовременной субсидии на приобретение жилого помещения, назначение и выплата субсидии.
3.1.12. Ведение учета многодетных семей в Воронежской области.
3.1.13. Формирование и ведение сводного государственного областного реестра социально ориентированных некоммерческих организаций — получателей государственной (областной) поддержки.
(пп. 3.1.13 в ред. постановления правительства Воронежской области от 06.02.2014 N 90)
3.1.14. Осуществление регионального государственного контроля (надзора) в сфере социального обслуживания.
(пп. 3.1.14 введен постановлением правительства Воронежской области от 12.12.2014 N 1161; в ред. постановления правительства Воронежской области от 02.07.2020 N 611)
3.1.15. Формирование и ведение реестра поставщиков социальных услуг и регистра получателей социальных услуг.
(пп. 3.1.15 введен постановлением правительства Воронежской области от 12.12.2014 N 1161)
3.1.16. Утратил силу. — Постановление правительства Воронежской области от 21.01.2019 N 32.
3.2. Департамент предоставляет следующие государственные услуги:
3.2.1. Выплата и перерасчет пенсии за выслугу лет.
3.2.2. Назначение государственной социальной помощи за счет средств областного бюджета отдельным категориям граждан, проживающим на территории Воронежской области.
3.2.3. Прием заявлений и организация предоставления гражданам субсидий на оплату жилых помещений и коммунальных услуг.
3.2.4. Назначение ежемесячной денежной выплаты на ребенка в возрасте от трех до семи лет включительно.
(пп. 3.2.4 введен постановлением правительства Воронежской области от 25.01.2021 N 25)
3.2.4 — 3.2.5. Утратили силу с 1 января 2018 года. — Постановление правительства Воронежской области от 29.11.2017 N 941.
3.2.6. Утратил силу. — Постановление правительства Воронежской области от 22.03.2016 N 173.
3.3. Департамент исполняет и предоставляет иные функции и услуги:
3.3.1. Осуществление функций и полномочий учредителя государственных учреждений Воронежской области.
(пп. 3.3.1 в ред. постановления правительства Воронежской области от 02.07.2020 N 611)
3.3.2. Регулирование кадровой политики по подбору и расстановке персонала из числа руководителей, заместителей и главных бухгалтеров подведомственных учреждений.
(в ред. постановления правительства Воронежской области от 02.07.2020 N 611)
3.3.3. Утратил силу. — Постановление правительства Воронежской области от 02. 07.2020 N 611.
07.2020 N 611.
3.3.4. Осуществление методического руководства финансовой деятельностью подведомственных учреждений, доведение показателей бюджетной росписи и лимитов бюджетных обязательств до получателей бюджетных средств в соответствии с законом об областном бюджете, установление порядка составления, утверждения и ведения бюджетных смет и порядка составления и утверждения плана финансово-хозяйственной деятельности подведомственных учреждений.
(пп. 3.3.4 в ред. постановления правительства Воронежской области от 02.07.2020 N 611)
3.3.5. Осуществление внутреннего финансового аудита.
(пп. 3.3.5 в ред. постановления правительства Воронежской области от 14.04.2020 N 321)
3.3.6. Обеспечение мобилизационной подготовки и мобилизации Департамента, руководство мобилизационной подготовкой подведомственных организаций.
3.3.7. Выполнение функции государственного заказчика при осуществлении закупок товаров, работ, услуг для государственных нужд.
(пп. 3.3.7 в ред. постановления правительства Воронежской области от 02. 07.2020 N 611)
07.2020 N 611)
3.3.7.1. Осуществление ведомственного контроля в сфере закупок для обеспечения нужд подведомственных учреждений.
(пп. 3.3.7.1 введен постановлением правительства Воронежской области от 02.07.2020 N 611)
3.3.8. Организация внедрения современных программных комплексов по всем направлениям деятельности департамента в подведомственных государственных учреждениях.
3.3.9. Формирование и утверждение государственных заданий по оказанию услуг подведомственными учреждениями.
3.3.10. Оценка качества фактически предоставляемых услуг на предмет их соответствия стандартам качества и (или) административным регламентам оказания государственных услуг.
3.3.11. Утратил силу. — Постановление правительства Воронежской области от 02.07.2020 N 611.
3.3.12. Организация, ведение бюджетного учета в Департаменте и формирование бюджетной отчетности на основании представленной бюджетной отчетности подведомственных учреждений.
(п. 3.3.12 в ред. постановления правительства Воронежской области от 02. 07.2020 N 611)
07.2020 N 611)
3.3.13. Осуществление в установленном порядке работы по комплектованию, хранению, учету и использованию архивных документов, образовавшихся в процессе деятельности Департамента.
3.3.14. Участие в организации альтернативной гражданской службы в подведомственных учреждениях, включая меры по реализации прав граждан, проходящих альтернативную гражданскую службу, и их социальную защиту.
3.3.15. Правовое регулирование и организация социального обслуживания в Воронежской области в пределах полномочий, установленных Федеральным законом от 28 декабря 2013 года N 442-ФЗ «Об основах социального обслуживания граждан в Российской Федерации».
(пп. 3.3.15 в ред. постановления правительства Воронежской области от 06.07.2017 N 533)
3.3.16. Определение порядка приема заявлений о включении в список детей-сирот и детей, оставшихся без попечения родителей, лиц из числа детей-сирот и детей, оставшихся без попечения родителей, лиц, которые относились к категории детей-сирот и детей, оставшихся без попечения родителей, лиц из числа детей-сирот и детей, оставшихся без попечения родителей, и достигли возраста 23 лет, которые подлежат обеспечению жилыми помещениями, и исчерпывающего перечня документов, которые прилагаются к заявлению.
(пп. 3.3.16 в ред. постановления правительства Воронежской области от 25.09.2019 N 909)
3.3.17. Определение порядка предоставления мер социальной поддержки гражданам, страдающим социально значимыми заболеваниями, гражданам, страдающим заболеваниями, представляющими опасность для окружающих.
(в ред. постановления правительства Воронежской области от 11.11.2015 N 869)
3.3.18. Определение порядка предоставления мер социальной поддержки гражданам, страдающим психическими расстройствами, находящимся в трудной жизненной ситуации.
3.3.19. Определение порядка предоставления ежемесячных денежных выплат за счет средств областного бюджета многодетным малоимущим семьям в целях компенсации проезда учащихся общеобразовательных организаций, профессиональных образовательных организаций и образовательных организаций высшего образования к месту учебы и обратно во внутригородском, пригородном и внутрирайонном общественном транспорте (кроме такси), а также в целях компенсации питания учащихся общеобразовательных организаций, профессиональных образовательных организаций и образовательных организаций высшего образования.
(в ред. постановлений правительства Воронежской области от 11.11.2015 N 869, от 02.07.2020 N 611)
3.3.20. Определение порядка назначения и выплаты денежной компенсации на приобретение продуктов полноценного питания беременным женщинам, кормящим матерям и детям в возрасте до трех лет.
(пп. 3.3.20 в ред. постановления правительства Воронежской области от 26.08.2020 N 815)
3.3.21. Установление и выплата региональной социальной доплаты к пенсии в случаях, предусмотренных федеральным и областным законодательством.
(пп. 3.3.21 в ред. постановления правительства Воронежской области от 26.08.2020 N 815)
3.3.22. Определение денежного эквивалента мер социальной поддержки по оплате проезда на автомобильном и железнодорожном транспорте пригородного сообщения.
3.3.23. Определение порядка назначения и выплаты ежемесячной денежной выплаты нуждающимся в поддержке семьям при рождении после 31 декабря 2012 года третьего ребенка или последующих детей до достижения ребенком возраста трех лет.
3.3.24. Организация выплаты денежной компенсации лицам, подвергшимся репрессиям в виде лишения свободы, помещения на принудительное лечение в психиатрические лечебные учреждения и впоследствии реабилитированным, а также выплаты реабилитированным лицам денежной компенсации за конфискованное, изъятое и вышедшее иным путем из их владения в связи с репрессиями имущество.
3.3.25. Определение порядка и сроков представления подведомственными учреждениями реестров о потребности в денежных средствах федерального бюджета на компенсационные выплаты в связи с расходами по оплате пользования жилым помещением, содержания жилого помещения, взноса на капитальный ремонт общего имущества в многоквартирном доме, коммунальных и других видов услуг членам семей погибших (умерших) военнослужащих и сотрудников некоторых федеральных органов исполнительной власти, а также направления указанных реестров в уполномоченный федеральный орган исполнительной власти в соответствии с действующим законодательством.
(пп. 3.3.25 в ред. постановления правительства Воронежской области от 26.08.2020 N 815)
3.3.26. Определение порядка предоставления мер социальной поддержки в виде ежемесячной денежной выплаты ветеранам труда и лицам, приравненным к ним, из числа ветеранов военной службы, труженикам тыла, реабилитированным лицам и лицам, признанным пострадавшими от политических репрессий, в соответствии с действующим законодательством.
(в ред. постановления правительства Воронежской области от 03.08.2016 N 560)
3.3.27. Определение порядка установления доплаты к пенсии по случаю потери кормильца членам семьи военнослужащих, погибших (умерших) при исполнении обязанностей военной службы в мирное время или умерших вследствие военной травмы после увольнения с военной службы, а также определение порядка предоставления мер социальной поддержки членам семьи военнослужащего, погибшего в период прохождения военной службы в мирное время, в виде ежемесячной денежной выплаты за проезд в пассажирском транспорте городского сообщения и денежной компенсации стоимости услуг связи.
3.3.28. Определение порядка предоставления денежной компенсации на оплату жилого помещения и (или) коммунальных услуг отдельным категориям граждан, проживающим на территории Воронежской области, определенным законодательством Российской Федерации и Воронежской области.
(пп. 3.3.28 в ред. постановления правительства Воронежской области от 06.07.2017 N 533)
3.3.29. Осуществление ежегодной денежной выплаты лицам, награжденным нагрудным знаком «Почетный донор России» («Почетный донор СССР»), реализация прав граждан на социальную поддержку по выплате государственных единовременных пособий и ежемесячных денежных компенсаций при возникновении поствакцинальных осложнений.
(в ред. постановлений правительства Воронежской области от 25.12.2014 N 1203, от 02.07.2020 N 611)
3.3.29.1. Реализация прав граждан на социальную поддержку по выплате государственных пособий гражданам, имеющим детей.
(пп. 3.3.29.1 введен постановлением правительства Воронежской области от 02.07.2020 N 611)
3. 3.30. Определение порядка назначения и выплаты пособия на ребенка.
3.30. Определение порядка назначения и выплаты пособия на ребенка.
(в ред. постановления правительства Воронежской области от 03.08.2016 N 560)
3.3.31. Реализация на территории Воронежской области государственной политики в сфере социальной поддержки Героев Советского Союза, Героев Российской Федерации, полных кавалеров ордена Славы, Героев Социалистического Труда, Героев Труда Российской Федерации, полных кавалеров ордена Трудовой Славы, почетных граждан Воронежской области, граждан, имеющих особые заслуги перед Воронежской областью, в том числе по возмещению расходов, связанных с изготовлением и сооружением надгробий на могилах Героев Советского Союза, Героев Российской Федерации, полных кавалеров ордена Славы, Героев Социалистического Труда, Героев Труда Российской Федерации и полных кавалеров ордена Трудовой Славы, с захоронением умерших (погибших) Героев Социалистического Труда, Героев Труда Российской Федерации и полных кавалеров ордена Трудовой Славы, в случаях, предусмотренных действующим законодательством.
(в ред. постановлений правительства Воронежской области от 03.08.2016 N 560, от 06.07.2017 N 533)
3.3.32. Определение порядка расходования средств, выделенных из федерального, областного бюджетов, бюджета Пенсионного фонда Российской Федерации, на выплату пособий, компенсаций, выплат, субсидий и других социальных выплат отдельным категориям граждан.
(пп. 3.3.32 в ред. постановления правительства Воронежской области от 02.07.2020 N 611)
3.3.33. Реализация государственной политики в интересах детей, решение вопросов социальной поддержки и социального обслуживания детей-сирот и детей, оставшихся без попечения родителей (за исключением детей, обучающихся в федеральных образовательных организациях), безнадзорных детей, детей-инвалидов в пределах своей компетенции.
(в ред. постановления правительства Воронежской области от 06.07.2017 N 533)
3.3.34. Определение порядка предоставления ежемесячных денежных выплат за счет средств областного бюджета приемным семьям в целях компенсации проезда учащихся общеобразовательных организаций, профессиональных образовательных организаций и образовательных организаций высшего образования к месту учебы и обратно во внутригородском, пригородном и внутрирайонном общественном транспорте (кроме такси), а также в целях компенсации питания учащихся общеобразовательных организаций, профессиональных образовательных организаций и образовательных организаций высшего образования.
(пп. 3.3.34 в ред. постановления правительства Воронежской области от 11.11.2015 N 869)
3.3.35. Осуществление деятельности, связанной с перевозкой между субъектами Российской Федерации, а также в пределах территорий государств — участников Содружества Независимых Государств несовершеннолетних, самовольно ушедших из семей, организаций для детей-сирот и детей, оставшихся без попечения родителей, образовательных организаций и иных организаций.
3.3.36. Утверждение тарифов на социальные услуги на основании подушевых нормативов финансирования социальных услуг.
(пп. 3.3.26 в ред. постановления правительства Воронежской области от 02.07.2020 N 611)
3.3.37. Установление порядка принятия решения о включении или об отказе во включении в список детей-сирот и детей, оставшихся без попечения родителей, лиц из числа детей-сирот и детей, оставшихся без попечения родителей, лиц, которые относились к категории детей-сирот и детей, оставшихся без попечения родителей, лиц из числа детей-сирот и детей, оставшихся без попечения родителей, и достигли возраста 23 лет, которые подлежат обеспечению жилыми помещениями.
(пп. 3.3.37 в ред. постановления правительства Воронежской области от 25.09.2019 N 909)
3.3.38. Установление правил выплаты инвалидам (в том числе детям-инвалидам), имеющим транспортные средства в соответствии с медицинскими показаниями, или их законным представителям компенсации от уплаченной ими страховой премии по договору обязательного страхования гражданской ответственности владельцев транспортных средств.
3.3.39. Утратил силу с 1 января 2021 года. — Постановление правительства Воронежской области от 03.12.2020 N 1067.
3.3.40. Организация и функционирование системы внутреннего обеспечения соответствия требованиям антимонопольного законодательства деятельности Департамента.
(пп. 3.3.40 в ред. постановления правительства Воронежской области от 18.03.2019 N 257)
3.3.41. Осуществление государственного управления и координации деятельности по образованию приемных семей для граждан пожилого возраста и инвалидов на территории Воронежской области.
3.3.42. Предоставление единовременной денежной выплаты членам семьи погибшего (умершего) работника добровольной пожарной охраны или добровольного пожарного и определение порядка возмещения расходов, связанных с погребением добровольных пожарных, работников добровольной пожарной охраны, погибших (умерших) в период и в связи с привлечением их в установленном порядке к тушению пожаров и (или) проведению аварийно-спасательных работ, в соответствии с действующим федеральным и региональным законодательством.
(пп. 3.3.42 в ред. постановления правительства Воронежской области от 03.08.2016 N 560)
3.3.43. Установление порядка предоставления регионального материнского капитала, а также порядка распоряжения средствами регионального материнского капитала.
(пп. 3.3.43 в ред. постановления правительства Воронежской области от 06.07.2017 N 533)
3.3.44. Организация и осуществление ведомственного контроля за соблюдением трудового законодательства и иных нормативных правовых актов, содержащих нормы трудового права, в отношении подведомственных государственных учреждений.
3.3.45. Организация работы по обеспечению санаторно-курортным лечением работников бюджетной сферы, проживающих на территории Воронежской области.
3.3.46. Обеспечение деятельности комиссии по вопросам международной гуманитарной помощи правительства Воронежской области.
3.3.47. Оказание бесплатной юридической помощи отдельным категориям граждан на территории Воронежской области.
(пп. 3.3.47 введен постановлением правительства Воронежской области от 22. 03.2016 N 173)
03.2016 N 173)
3.3.48. Заключение с адвокатской палатой Воронежской области соглашения об оказании бесплатной юридической помощи адвокатами, являющимися участниками государственной системы бесплатной юридической помощи.
3.3.49. Ежегодное опубликование не позднее 31 декабря списка адвокатов, являющихся участниками государственной системы бесплатной юридической помощи, в средствах массовой информации и на своем официальном сайте в информационно-телекоммуникационной сети Интернет.
3.3.50. Установление порядка направления адвокатской палатой Воронежской области ежегодного доклада и сводного отчета об оказании адвокатами бесплатной юридической помощи в рамках государственной системы оказания бесплатной юридической помощи.
3.3.51. Определение порядка предоставления жилых помещений по договорам найма специализированных жилых помещений детям-сиротам и детям, оставшимся без попечения родителей, лицам из числа детей-сирот и детей, оставшихся без попечения родителей, и лицам, ранее относившимся к категории детей-сирот и детей, оставшихся без попечения родителей, лиц из числа детей-сирот и детей, оставшихся без попечения родителей, и достигшим возраста 23 лет.
3.3.52. Определение порядка предоставления меры социальной поддержки в виде единовременной денежной выплаты на ремонт жилого помещения детям-сиротам и детям, оставшимся без попечения родителей, лицам из числа детей-сирот и детей, оставшихся без попечения родителей.
3.3.53. Предоставление субсидий организациям железнодорожного транспорта, осуществляющим деятельность по перевозке пассажиров, на компенсацию части потерь в доходах в связи с принятием решения об установлении льгот на проезд по территории Воронежской области учащихся и воспитанников общеобразовательных организаций старше 7 лет и студентов, предусмотренных Законом Воронежской области от 14 ноября 2008 года N 103-ОЗ «О социальной поддержке отдельных категорий граждан в Воронежской области».
(пп. 3.3.53 в ред. постановления правительства Воронежской области от 06.07.2017 N 533)
3.3.54. Организация выплаты единовременного денежного поощрения одному из родителей (усыновителей) при награждении орденом «Родительская слава».
(пп. 3.3.54 в ред. постановления правительства Воронежской области от 06.07.2017 N 533)
3.3.55. Организация и обеспечение отдыха и оздоровления детей в организациях отдыха детей и их оздоровления — организациях (независимо от их организационно-правовых форм) сезонного или круглогодичного действия, стационарного типа, с круглосуточным пребыванием, оказывающих услуги по организации отдыха и оздоровления детей, а также организация отдыха и оздоровления детей, находящихся в трудной жизненной ситуации (за исключением находящихся в организациях, подведомственных исполнительному органу государственной власти Воронежской области в сфере образования, науки и молодежной политики).
(пп. 3.3.35 в ред. постановления правительства Воронежской области от 02.07.2020 N 611)
3.3.56. Установление порядка назначения и выплаты ежемесячной денежной компенсации затрат на организацию обучения детей-инвалидов по основным общеобразовательным программам на дому.
(пп. 3.3.56 в ред. постановления правительства Воронежской области от 29. 11.2017 N 941)
11.2017 N 941)
3.3.57. Определение порядка и условий предоставления дополнительной меры социальной поддержки гражданам, страдающим хронической почечной недостаточностью и нуждающимся в лечении методом программного гемодиализа, в виде ежемесячной денежной компенсации стоимости проезда к месту проведения процедуры лечения методом программного гемодиализа и обратно по территории Воронежской области.
3.3.58. Выплата единовременного денежного вознаграждения гражданам, награжденным медалью «За труды во благо земли Воронежской».
(пп. 3.3.58 в ред. постановления правительства Воронежской области от 02.07.2020 N 611)
3.3.58.1. Выплата единовременного денежного вознаграждения гражданам, награжденным почетным знаком «За заслуги в воспитании детей».
(пп. 3.3.58.1 введен постановлением правительства Воронежской области от 02.07.2020 N 611)
3.3.58.2. Выплата единовременного денежного вознаграждения гражданам, награжденным почетным знаком «За заслуги в развитии сельского хозяйства Воронежской области».
(пп. 3.3.58.2 введен постановлением правительства Воронежской области от 02.07.2020 N 611)
3.3.58.3. Выплата единовременного денежного поощрения гражданам, награжденным почетным знаком «За верность медицинскому долгу».
(пп. 3.3.58.3 введен постановлением правительства Воронежской области от 07.06.2021 N 329)
3.3.59. Определение порядка предоставления меры социальной поддержки многодетным малоимущим семьям и приемным семьям в виде денежной выплаты на приобретение одежды обучающихся (школьной формы) для каждого обучающегося ребенка.
(в ред. постановлений правительства Воронежской области от 21.01.2019 N 32, от 02.07.2020 N 611)
3.3.60. Рассмотрение обращений граждан.
3.3.61. Определение порядка предоставления мер социальной поддержки детей-сирот и детей, оставшихся без попечения родителей, лиц из числа детей-сирот и детей, оставшихся без попечения родителей, а также лиц, которые относились к категории детей-сирот и детей, оставшихся без попечения родителей, лиц из числа детей-сирот и детей, оставшихся без попечения родителей, и достигли возраста 23 лет, в виде предоставления ежемесячной денежной компенсации за наем (поднаем) жилых помещений до фактического обеспечения их жилыми помещениями.
(введен постановлением правительства Воронежской области от 06.02.2014 N 90; в ред. постановления правительства Воронежской области от 02.07.2020 N 611)
3.3.62. Координация деятельности исполнительных органов государственной власти по решению вопросов государственной (областной) поддержки социально ориентированных некоммерческих организаций.
(введен постановлением правительства Воронежской области от 06.02.2014 N 90)
3.3.63. Разработка и реализация государственных программ Воронежской области по вопросам государственной (областной) поддержки социально ориентированных некоммерческих организаций с учетом социально-экономических, экологических, культурных и других особенностей, а также в сфере обеспечения инвалидам беспрепятственного доступа к объектам социальной, инженерной и транспортной инфраструктур.
(пп. 3.3.63 в ред. постановления правительства Воронежской области от 17.10.2017 N 794)
3.3.64. Финансирование научно-исследовательских и опытно-конструкторских работ по проблемам деятельности и развития социально ориентированных некоммерческих организаций за счет бюджетных ассигнований областного бюджета на государственную (областную) поддержку социально ориентированных некоммерческих организаций.
(введен постановлением правительства Воронежской области от 06.02.2014 N 90)
3.3.65. Пропаганда и популяризация деятельности социально ориентированных некоммерческих организаций за счет бюджетных ассигнований областного бюджета.
(введен постановлением правительства Воронежской области от 06.02.2014 N 90)
3.3.66. Содействие реализации муниципальных программ, предусматривающих мероприятия по поддержке социально ориентированных некоммерческих организаций.
(введен постановлением правительства Воронежской области от 06.02.2014 N 90)
3.3.67. Анализ финансовых, экономических, социальных и иных показателей деятельности социально ориентированных некоммерческих организаций, оценка эффективности мер, направленных на развитие социально ориентированных некоммерческих организаций в Воронежской области, прогноз их дальнейшего развития.
(введен постановлением правительства Воронежской области от 06.02.2014 N 90)
3.3.67.1. Оценка качества оказания общественно полезных услуг социально ориентированными некоммерческими организациями в сферах социальной поддержки, социального обслуживания и социальной защиты населения.
(пп. 3.3.67.1 введен постановлением правительства Воронежской области от 13.08.2018 N 690)
3.3.68. Методическое обеспечение органов местного самоуправления и оказание им содействия в разработке и реализации мер по поддержке социально ориентированных некоммерческих организаций на территориях муниципальных образований Воронежской области.
(введен постановлением правительства Воронежской области от 06.02.2014 N 90)
3.3.69. Методическое руководство и контроль за осуществлением органами местного самоуправления переданных им государственных полномочий по организации и осуществлению деятельности по опеке и попечительству в отношении лиц, признанных судом недееспособными или ограниченно дееспособными, а также дееспособных лиц, нуждающихся в попечительстве по состоянию здоровья, и недееспособных граждан, помещенных в соответствующие организации социального обслуживания.
(пп. 3.3.69 в ред. постановления правительства Воронежской области от 26.08.2020 N 815)
3.3.70. Обеспечение бесплатного доступа к информации о поставщиках социальных услуг, предоставляемых ими социальных услугах, видах социальных услуг, сроках, порядке и об условиях их предоставления, о тарифах на эти услуги, в том числе через средства массовой информации, включая размещение информации на Портале органов власти Воронежской области и официальных сайтах поставщиков социальных услуг в сети Интернет.
(введен постановлением правительства Воронежской области от 12.12.2014 N 1161; в ред. постановления правительства Воронежской области от 06.07.2017 N 533)
3.3.71. Организация профессионального обучения, профессионального образования и дополнительного профессионального образования работников поставщиков социальных услуг, а также инструктирования и обучения специалистов, работающих с инвалидами, по вопросам, связанным с обеспечением инвалидам беспрепятственного доступа к объектам социальной, инженерной и транспортной инфраструктур в соответствии с законодательством Российской Федерации и Воронежской области.
(пп. 3.3.71 в ред. постановления правительства Воронежской области от 17.10.2017 N 794)
3.3.72. Ведение учета и отчетности в сфере социального обслуживания в Воронежской области.
(введен постановлением правительства Воронежской области от 12.12.2014 N 1161)
3.3.73. Организация поддержки социально ориентированных некоммерческих организаций, благотворителей и добровольцев (волонтеров), осуществляющих деятельность в сфере социального обслуживания в Воронежской области.
(введен постановлением правительства Воронежской области от 12.12.2014 N 1161; в ред. постановления правительства Воронежской области от 26.08.2020 N 815)
3.3.74. Утверждение номенклатуры организаций социального обслуживания в Воронежской области.
(введен постановлением правительства Воронежской области от 12.12.2014 N 1161)
3.3.75. Установление порядка расходования организациями социального обслуживания, находящимися в ведении Воронежской области, средств, образовавшихся в результате взимания платы за предоставление социальных услуг.
(введен постановлением правительства Воронежской области от 12.12.2014 N 1161)
3.3.76. Установление порядка приема на социальное обслуживание в стационарные организации социального обслуживания со специальным социальным обслуживанием, находящиеся в ведении Воронежской области, граждан из числа лиц, освобождаемых из мест лишения свободы, за которыми в соответствии с законодательством Российской Федерации установлен административный надзор и которые частично или полностью утратили способность к самообслуживанию.
(введен постановлением правительства Воронежской области от 12.12.2014 N 1161)
3.3.77. Установление обстоятельств, ухудшающих или способных ухудшить условия жизнедеятельности граждан, в соответствии с пунктом 8 части 1 статьи 15 Федерального закона от 28 декабря 2013 года N 442-ФЗ «Об основах социального обслуживания граждан в Российской Федерации».
(введен постановлением правительства Воронежской области от 12.12.2014 N 1161)
3.3.78. Утверждение тарифов на социальные услуги в порядке, устанавливаемом правительством Воронежской области.
(введен постановлением правительства Воронежской области от 12.12.2014 N 1161)
3.3.79. Утверждение порядка представления получателями социальных услуг сведений и документов, необходимых для предоставления социальных услуг.
(введен постановлением правительства Воронежской области от 12.12.2014 N 1161)
3.3.80. Разработка и реализация мероприятий по формированию и развитию рынка социальных услуг, в том числе по развитию негосударственных организаций социального обслуживания.
(введен постановлением правительства Воронежской области от 12.12.2014 N 1161)
3.3.81. Разработка и апробация методик и технологий в сфере социального обслуживания.
(введен постановлением правительства Воронежской области от 12.12.2014 N 1161)
3.3.82. Установление мер социальной поддержки и стимулирования работников организаций социального обслуживания Воронежской области.
(пп. 3.3.82 в ред. постановления правительства Воронежской области от 26.08.2020 N 815)
3.3.83. Создание условий для организации проведения независимой оценки качества условий оказания услуг организациями социального обслуживания.
(введен постановлением правительства Воронежской области от 12.12.2014 N 1161; в ред. постановления правительства Воронежской области от 25.09.2019 N 909)
3.3.84. Осуществление полномочий по предоставлению компенсаций и других выплат гражданам, подвергшимся воздействию радиации вследствие катастрофы на Чернобыльской АЭС, ядерных испытаний на Семипалатинском полигоне, аварии в 1957 году на производственном объединении «Маяк» и сбросов радиоактивных отходов в реку Теча, гражданам из подразделений особого риска.
(введен постановлением правительства Воронежской области от 25.12.2014 N 1203; в ред. постановления правительства Воронежской области от 03.08.2016 N 560)
3.3.85. Осуществление в пределах своей компетенции мероприятий по противодействию терроризму в установленной сфере деятельности.
(введен постановлением правительства Воронежской области от 11.11.2015 N 869)
3.3.86. Определение порядка регистрации заявлений, а также порядка принятия решений о назначении ежемесячной денежной компенсации, установленной частями 9, 10 и 13 статьи 3 Федерального закона от 07.11.2011 N 306-ФЗ «О денежном довольствии военнослужащих и предоставлении им отдельных выплат».
(введен постановлением правительства Воронежской области от 11.11.2015 N 869)
3.3.87. Определение порядка возмещения специализированным службам по вопросам похоронного дела стоимости услуг, предоставляемых согласно гарантированному перечню услуг по погребению, и порядка назначения и выплаты социального пособия на погребение.
(пп. 3.3.87 введен постановлением правительства Воронежской области от 03.08.2016 N 560)
3.3.88. Определение порядка предоставления компенсации расходов на уплату взноса на капитальный ремонт общего имущества в многоквартирном доме отдельным категориям граждан, постоянно проживающих на территории Воронежской области.
(пп. 3.3.88 введен постановлением правительства Воронежской области от 03.08.2016 N 560)
3.3.89. Обеспечение реализации мер по противодействию коррупции в Департаменте и подведомственных учреждениях.
(п. 3.3.89 введен постановлением правительства Воронежской области от 21.09.2016 N 700)
3.3.90. Организация оформления и выдачи гражданам удостоверений (их дубликатов) о праве на меры социальной поддержки, выдача которых в соответствии с действующим федеральным и региональным законодательством осуществляется органами государственной власти субъекта Российской Федерации.
(п. 3.3.90 введен постановлением правительства Воронежской области от 21.09.2016 N 700)
3. 3.91. Разработка и реализация политики информационной безопасности Департамента и подведомственных учреждений. Обеспечение реализации мер по защите информации ограниченного доступа.
3.91. Разработка и реализация политики информационной безопасности Департамента и подведомственных учреждений. Обеспечение реализации мер по защите информации ограниченного доступа.
(пп. 3.3.91 введен постановлением правительства Воронежской области от 06.07.2017 N 533)
3.3.91.1. Обеспечение защиты информации, содержащейся в государственных информационных системах, оператором которых является Департамент.
(пп. 3.3.91.1 введен постановлением правительства Воронежской области от 21.01.2019 N 32)
3.3.91.2. Обеспечение технической защиты информации, содержащей сведения, составляющие государственную тайну, в Департаменте.
(пп. 3.3.91.2 введен постановлением правительства Воронежской области от 21.01.2019 N 32)
3.3.91.3. Осуществление функций поставщика информации как участника отношений, возникающих в связи с созданием и функционированием Единой государственной информационной системы социального обеспечения.
(пп. 3.3.91.3 введен постановлением правительства Воронежской области от 21. 01.2019 N 32)
01.2019 N 32)
3.3.92. Разработка мер по реализации государственной политики в сфере обеспечения инвалидам беспрепятственного доступа к объектам социальной, инженерной и транспортной инфраструктур.
(пп. 3.3.92 в ред. постановления правительства Воронежской области от 17.10.2017 N 794)
3.3.93. Осуществление мониторинга в сфере обеспечения беспрепятственного доступа инвалидов к объектам социальной, инженерной и транспортной инфраструктур.
(пп. 3.3.93 введен постановлением правительства Воронежской области от 17.10.2017 N 794)
3.3.94. Организация и осуществление областных научно-технических и инновационных программ и проектов в сфере обеспечения беспрепятственного доступа инвалидов к объектам социальной, инженерной и транспортной инфраструктур.
(пп. 3.3.94 в ред. постановления правительства Воронежской области от 21.01.2019 N 32)
3.3.95. Взаимодействие с общественными объединениями инвалидов.
(пп. 3.3.95 введен постановлением правительства Воронежской области от 17. 10.2017 N 794)
10.2017 N 794)
3.3.95.1. Назначение и осуществление ежемесячной выплаты в связи с рождением (усыновлением) первого ребенка, в том числе посредством подведомственных учреждений социальной защиты.
(пп. 3.3.95.1 введен постановлением правительства Воронежской области от 14.02.2018 N 151)
3.3.95.2. Реализация мер по поддержке и содействию развитию добровольчества (волонтерства) в подведомственной сфере деятельности.
(пп. 3.3.95.2 введен постановлением правительства Воронежской области от 28.01.2020 N 62)
3.3.96. Определение порядка предоставления денежной компенсации платы за наем жилого помещения по договору найма педагогическим работникам государственных образовательных организаций Воронежской области и муниципальных образовательных организаций, проживающим и осуществляющим профессиональную деятельность в сельской местности.
(пп. 3.3.96 в ред. постановления правительства Воронежской области от 02.07.2020 N 611)
3.3.97. Определение порядка предоставления ежемесячной денежной компенсации платы за наем жилого помещения по договору найма медицинским работникам медицинских организаций, подведомственных исполнительному органу государственной власти Воронежской области в сфере охраны здоровья, оказывающим первичную доврачебную медико-санитарную помощь, первичную врачебную медико-санитарную помощь, скорую, в том числе скорую специализированную, медицинскую помощь.
(пп. 3.3.97 введен постановлением правительства Воронежской области от 02.07.2020 N 611)
3.3.98. Определение порядка предоставления единовременной денежной выплаты медицинским работникам медицинских организаций, подведомственных исполнительному органу государственной власти Воронежской области в сфере охраны здоровья, оказывающим первичную доврачебную медико-санитарную помощь, первичную врачебную медико-санитарную помощь, скорую, в том числе скорую специализированную, медицинскую помощь.
(пп. 3.3.98 введен постановлением правительства Воронежской области от 02.07.2020 N 611)
3.3.99. Осуществление координации взаимодействия исполнительных органов государственной власти и организаций Воронежской области в сфере реабилитации, абилитации инвалидов (в том числе детей-инвалидов) в рамках компетенции Воронежской области.
(пп. 3.3.99 в ред. постановления правительства Воронежской области от 26.08.2020 N 815)
3.3.100. Организация совместно с подведомственными учреждениями социального обслуживания работы по реализации реабилитационных или абилитационных мероприятий, предусмотренных индивидуальной программой реабилитации или абилитации инвалида (индивидуальной программой реабилитации или абилитации ребенка-инвалида).
(пп. 3.3.100 введен постановлением правительства Воронежской области от 26.08.2020 N 815)
3.3.101. Реализация прав граждан на меры социальной поддержки по обеспечению жилыми помещениями в виде единовременной денежной выплаты многодетным гражданам с их согласия взамен предоставления им земельного участка в собственность бесплатно.
(пп. 3.3.101 в ред. постановления правительства Воронежской области от 07.06.2021 N 329)
3.3.102. Осуществление иных функций и предоставление услуг в соответствии с действующим федеральным и региональным законодательством.
(пп. 3.3.102 введен постановлением правительства Воронежской области от 07.06.2021 N 329)
4. ПРАВА ДЕПАРТАМЕНТА
Департамент в ходе своей деятельности для осуществления поставленных задач и реализации полномочий по исполнению функций и предоставлению услуг в подведомственной сфере деятельности вправе:
4.1. Запрашивать и получать:
— сведения и информацию о деятельности от субъектов подведомственной сферы деятельности;
— справочные и информационные материалы от различных органов государственной власти, органов местного самоуправления, организаций независимо от их организационно-правовых форм и форм собственности.
4.2. Осуществлять работу со сведениями, составляющими государственную тайну.
4.3. Пользоваться информационными ресурсами Воронежской области.
4.4. Создавать совещательные и экспертные органы, комиссии по проверке финансово-хозяйственной деятельности подведомственных организаций, коллегию Департамента.
4.5. Созывать совещания по проблемам государственного регулирования в подведомственной сфере деятельности с привлечением руководителей и специалистов исполнительных органов государственной власти Воронежской области, органов местного самоуправления Воронежской области, общественных объединений, хозяйствующих субъектов, расположенных на территории Воронежской области.
4.6. Организовывать и проводить конференции, семинары, встречи, выставки, смотры и другие мероприятия, направленные на достижение поставленных целей и реализацию возложенных функций.
4.7. Принимать участие в совещаниях, а также в работе коллегиальных органов, создаваемых по решению исполнительных органов государственной власти области, по вопросам государственного регулирования в подведомственной сфере деятельности.
4.8. Вносить предложения по созданию (учреждению), реорганизации и ликвидации государственных учреждений, фондов для достижения поставленных целей и реализации возложенных функций.
4.9. Привлекать в установленном порядке для выполнения возложенных функций научные, образовательные учреждения, отдельных ученых, специалистов органов государственной власти и органов местного самоуправления Воронежской области, представителей федеральных органов власти.
4.10. Владеть, пользоваться закрепленным на праве оперативного управления за Департаментом имуществом.
4.11. В пределах своих полномочий осуществлять создание, ведение и актуализацию баз данных.
4.12. В пределах своей компетенции контролировать исполнение законодательства Российской Федерации, Воронежской области, а также выполнение подведомственными учреждениями поручений губернатора и правительства Воронежской области, Департамента.
4.13. Составлять протоколы об административных правонарушениях, предусмотренных статьями 5. 41, 9.13 (в части уклонения от исполнения требований к обеспечению доступности для инвалидов объектов социального обслуживания и предоставляемых услуг в сфере социального обслуживания), 9.14, 11.24, частью 1 статьи 19.5, статьями 19.6, 19.7 Кодекса Российской Федерации об административных правонарушениях.
41, 9.13 (в части уклонения от исполнения требований к обеспечению доступности для инвалидов объектов социального обслуживания и предоставляемых услуг в сфере социального обслуживания), 9.14, 11.24, частью 1 статьи 19.5, статьями 19.6, 19.7 Кодекса Российской Федерации об административных правонарушениях.
(п. 4.13 в ред. постановления правительства Воронежской области от 26.08.2020 N 815)
4.14. Утверждать перечень должностных лиц Департамента, имеющих право составлять протоколы об административных правонарушениях, составление которых отнесено к компетенции Департамента.
(п. 4.14 введен постановлением правительства Воронежской области от 13.08.2018 N 690)
4.15. Рассматривать дела об административных правонарушениях, предусмотренных статьей 9.13 (в части уклонения от исполнения требований к обеспечению доступности для инвалидов объектов социального обслуживания и предоставляемых услуг в сфере социального обслуживания) Кодекса Российской Федерации об административных правонарушениях.
(п. 4.15 введен постановлением правительства Воронежской области от 25.09.2019 N 909)
5. ОБЯЗАННОСТИ ДЕПАРТАМЕНТА
Департамент обязан:
5.1. Выполнять требования законодательства Российской Федерации и Воронежской области.
5.2. Обеспечивать в пределах своей компетенции реализацию (предоставление) возложенных на Департамент государственных функций (услуг), а также иных функций и услуг.
5.3. Соблюдать требования Регламента взаимодействия исполнительных органов государственной власти Воронежской области.
5.4. Отстаивать интересы Воронежской области, правительства Воронежской области, Департамента в органах судебной власти и прокуратуры, органах внутренних дел, иных государственных органах, а также перед субъектами Российской Федерации, физическими и юридическими лицами, органами местного самоуправления, иными организациями.
5.5. Обеспечивать сохранность служебной и государственной тайны, не допускать разглашения персональных данных физических лиц и иной охраняемой законом информации.
5.6. Давать разъяснения юридическим и физическим лицам по вопросам, входящим в компетенцию Департамента.
5.7. Анализировать судебную практику, представления и протесты прокуратуры, экспертные заключения компетентных органов и готовить соответствующие документы, отражающие результаты анализа и предложения по улучшению правоприменения в подведомственной сфере деятельности.
5.8. Принимать в рамках своей компетенции меры и вносить предложения по улучшению работы Департамента, органов государственной власти Воронежской области, укреплению их авторитета.
5.9. Контролировать деятельность:
— подведомственных учреждений;
— органов местного самоуправления, администраций городских округов и муниципальных районов Воронежской области в части осуществления ими переданных государственных полномочий в подведомственной сфере;
— исполнительных органов государственной власти Воронежской области в подведомственной сфере деятельности;
— иных органов и организаций в подведомственной сфере деятельности.
5.10. Разрабатывать и согласовывать проекты нормативных правовых актов Воронежской области, издавать приказы, регулирующие отношения в подведомственной сфере деятельности.
5.11. Давать заключения по проектам нормативных правовых актов и нормативно-технических документов в части вопросов, относящихся к подведомственной сфере деятельности.
5.12. Осуществлять функции главного распорядителя и получателя бюджетных средств, предусмотренных на содержание Департамента и государственных учреждений, в отношении которых Департамент исполняет функции и полномочия учредителя, а также иные бюджетные полномочия.
6. РУКОВОДСТВО ДЕПАРТАМЕНТОМ, ЕГО СТРУКТУРА
6.1. Руководство Департаментом осуществляет руководитель Департамента, назначаемый на должность и освобождаемый от должности губернатором Воронежской области.
6.2. Руководитель Департамента:
6.2.1. Организует работу Департамента в соответствии с возложенными на него задачами и функциями.
6.2.2. Представляет в управление государственной службы и кадров правительства Воронежской области предложения о структуре Департамента, штатной численности и фонде оплаты труда работников Департамента для утверждения в установленном порядке.
6.2.3. Организует перспективное и текущее планирование деятельности Департамента.
6.2.4. Определяет функции структурных подразделений Департамента.
6.2.5. Представляет Департамент в органах государственной власти, судебных органах, контрольных и надзорных органах, органах местного самоуправления, государственных и негосударственных организациях по вопросам, входящим в компетенцию Департамента.
6.2.6. Выступает без доверенности от имени Департамента, заключает договоры, контракты, соглашения и совершает иные действия от имени Департамента.
6.2.7. Подготавливает документы, в том числе приказы, в пределах компетенции Департамента.
6.2.8. Вносит в управление государственной службы и кадров правительства Воронежской области предложения о проведении конкурсов на замещение вакантных должностей и формирование кадрового резерва Департамента.
6.2.9. Вносит предложения представителю нанимателя в отношении государственных гражданских служащих Департамента:
— о назначении на должность и освобождении от должности;
— о применении мер поощрения и применении дисциплинарных взысканий;
— о формировании графика отпусков и внесении изменений в него;
— о командировании;
— о профессиональном развитии.
6.2.10. Вносит предложения представителю нанимателя о разработке должностных регламентов на вакантные должности и определении должностных обязанностей государственных гражданских служащих Департамента.
6.2.11. Обеспечивает проведение аттестации государственных гражданских служащих Департамента.
6.2.12. Назначает и освобождает от должности в установленном порядке руководителей подведомственных государственных учреждений, принимает решение об их поощрении и применении к ним дисциплинарных взысканий.
6.2.13. Осуществляет финансовое и материально-техническое обеспечение работников Департамента, в том числе обеспечивает безопасность и условия труда, соответствующие государственным нормативным требованиям охраны труда.
6.2.14. Вносит в установленном порядке предложения о награждении работников Департамента и подведомственных государственных учреждений, а также других лиц, осуществляющих деятельность в установленной сфере, государственными наградами Российской Федерации, ведомственными наградами федеральных исполнительных органов государственной власти, наградами Воронежской области, о представлении их к поощрению губернатором Воронежской области и правительством Воронежской области.
6.2.15. Участвует в заседаниях коллегий, комиссий и других коллегиальных органов, образованных при губернаторе Воронежской области и правительстве Воронежской области.
6.2.16. Дает поручения по вопросам деятельности Департамента, обязательные для исполнения работниками Департамента, а также руководителями подведомственных государственных учреждений.
6.2.17. Осуществляет прием граждан и представителей юридических лиц.
6.2.18. Решает иные вопросы, отнесенные к полномочиям Департамента.
(п. 6.2 в ред. постановления правительства Воронежской области от 28.01.2020 N 62)
6.3. Руководитель Департамента имеет первого заместителя и заместителей.
6.4. В случае временного отсутствия руководителя Департамента (болезнь, командировка, отпуск) его обязанности исполняются первым заместителем или заместителями руководителя Департамента в соответствии с распределением обязанностей между ними.
7. ОТВЕТСТВЕННОСТЬ ДЕПАРТАМЕНТА
7.1. Руководитель Департамента несет ответственность за:
7.1.1. Неисполнение или ненадлежащее исполнение функций Департамента в соответствии с требованиями действующего законодательства.
7.1.2. Невыполнение основных показателей деятельности Департамента, установленных нормативным правовым актом правительства Воронежской области.
8. РЕОРГАНИЗАЦИЯ И ЛИКВИДАЦИЯ ДЕПАРТАМЕНТА
8.1. Прекращение деятельности Департамента производится путем реорганизации или ликвидации в установленном законодательством порядке на основании соответствующего правового акта Воронежской области.
8.2. При реорганизации или ликвидации Департамента увольняемым сотрудникам гарантируется соблюдение их прав и интересов в соответствии с законодательством Российской Федерации и Воронежской области.
Обзор системы IVAN | Скачать научную диаграмму
Контекст 1
… вождение — это процесс, безопасность которого во многом зависит от точной обработки визуальной информации и правильной реакции водителей. Такие объекты, как дорожные знаки, предупреждения и полосы движения, имеют решающее значение для помощи водителям в понимании дорожных условий. Неспособность распознать эти объекты может привести к серьезным последствиям. На практике водители могут испытывать больше трудностей при идентификации этих объектов во время ночного вождения, что приводит к гораздо большей вероятности дорожно-транспортных происшествий.Статистика показывает, что в США более 20% дорожно-транспортных происшествий со смертельным исходом произошло между полуночью и 6:00 утра, что составляет лишь 2,4% от общего объема трафика. Помимо невнимательности водителей, серьезной причиной этой ситуации также является значительное снижение остроты зрения и поля зрения в ночное время из-за низкой освещенности, вызванной такими факторами, как плохая погода, неясные уличные фонари и ограниченный диапазон фар. Например, ближний свет фар освещает только около 56 метров, когда тормозной путь на скорости 100 км / ч составляет около 80 метров.Столкнувшись с этой проблемой, было привлечено внимание к исследованиям автомобильных систем ночного видения, которые помогают улучшить видимость объектов на дороге в ночное время [1]. Как правило, такая система оснащена ночными козырьками, такими как инфракрасные камеры, с которых может быть извлечена информация об объектах, присутствующих на дороге, таких как изгибы, столбы, пешеходы, другие автомобили и т. Д. Затем эта система проинформирует водителей с помощью визуальных, акустических или других сигналов о препятствиях, возникающих на их пути.Некоторые результаты исследований были преобразованы в реальные продукты, установленные на дорогих автомобилях, таких как BMW 6 серии Coupe [2] и Mercedes-Benz 2007 серии S-Class [3]. В этой статье мы представим систему ночного видения IVAN (Интеллектуальное видение для автомобилей в ночное время), которая фокусируется на обнаружении, освещении и распознавании дорожных знаков в ночное время. Инфракрасные камеры используются для решения проблемы плохой видимости в ночное время. Методы компьютерного зрения, такие как улучшение изображения, обнаружение и распознавание объектов и т. Д., интенсивно используются в IVAN для анализа видео, снятого инфракрасными камерами. Реализованы функции обнаружения и распознавания дорожных знаков, чтобы снизить вероятность пропуска дорожных знаков в темноте. Водитель может управлять системой через сенсорный экран, а звуковые уведомления используются для информирования водителя о возможных опасностях. Остальная часть статьи организована следующим образом. Раздел 2 знакомит с общей архитектурой и основными функциями нашей системы. Детали реализации подробно описаны в Разделе 3.Эксперименты и оценки представлены в Разделе 4. Раздел 5 подводит итоги нашей работы. На рисунке 1 показана системная архитектура IVAN. Он иллюстрирует взаимодействие между аппаратными и программными модулями. Чтобы обеспечить удобный, быстрый и простой интерфейс ввода, сенсорный экран используется для ввода данных от водителя и отображения обработанных видео. Водитель также может использовать виртуальную клавиатуру на сенсорном экране для ввода данных. хранится в базе данных. Если дорожный знак распознан, он отобразится на экране.В то же время IVAN предупредит водителя об обнаружении важного дорожного знака, например, предупреждения об опасности. Обнаруженная форма будет отображаться на экране, чтобы водитель мог перемещать прожектор для освещения соответствующей области. Чтобы адаптироваться к различным требованиям вождения, мы реализовали в IVAN четыре основных функции. i Адаптивное ночное видение — IVAN фиксирует вид автомобиля спереди с помощью инфракрасной камеры и отображает видео на сенсорном экране. Между тем, инфракрасная камера адаптивно меняет направление, если автомобиль поворачивает.Камера автоматически настраивается на лучший угол, чтобы всегда фиксировать вид спереди. i Обнаружение и распознавание дорожных знаков — модуль обнаружения сначала обнаруживает дорожные знаки, обрабатывая захваченное изображение. По этим обнаруженным признакам модуль распознавания распознает важные, такие как предупреждающие знаки и нормативные знаки. Для распознанных знаков рядом с каждым из них будет отображаться более четкое изображение, чтобы повысить осведомленность водителей. i Проецирование прожектора — как только дорожный знак был обнаружен и выбран пользователем, система немедленно находит его соответствующее положение и проецирует на него свет с помощью прожектора, установленного на вращающейся платформе.В IVAN также реализовано автоматическое слежение. Прожектор будет гореть на выбранном дорожном знаке во время движения автомобиля. i Масштабирование сцены — пользователь может просматривать дорожные знаки на большом расстоянии с помощью функции масштабирования. Пользователь может легко контролировать степень увеличения, скользя по сенсорному экрану. Видео, демонстрирующее все эти функции, доступно на сайте. Система реализована на встроенной платформе — плате EVOC Embedded Star System. Плата оснащена процессором Intel® Core TM 2Duo и 2 ГБ оперативной памяти.Сенсорный экран используется в качестве интерфейса ввода / вывода системы. На рисунке 3 показан внешний вид центральной части системы IVAN. Модуль обнаружения дорожных знаков обнаруживает и сегментирует потенциальные дорожные знаки в режиме реального времени. Основываясь на наблюдении, что большинство дорожных знаков имеют правильную геометрическую форму, такую как прямоугольник, треугольник и круг, следующие шаги используются для обнаружения дорожных знаков в IVAN. Входное изображение сначала обрабатывается для уменьшения шума с помощью фильтра Гаусса 5×5.Затем оттенки серого преобразуются в черный и белый (бинаризация) с использованием различных пороговых значений. Для каждого полученного таким образом сегментированного изображения извлекаются контуры белых областей. Контуры аппроксимируются в многоугольники с помощью алгоритма Дугласа-Пекера [4], который рекурсивно определяет подмножество вершин, в которых заключенная фигура похожа на исходную. Полученные в результате аппроксимированные многоугольники дополнительно анализируются: для повышения скорости и точности обнаружения они классифицируются на «четырехугольники» и «треугольники» по количеству вершин многоугольников.Затем рассчитываются их внутренние углы. Подходящие дорожные знаки выбираются из обнаруженной формы путем проверки их внутренних углов. Для четырехугольников внутренние углы должны быть в пределах 90 İ градусов; для треугольников внутренние углы должны быть в пределах 60 ± 2 градуса. Параметры İ 1 и İ 2 являются константами, определенными для обеспечения допусков для работы с искажением перспективы и шумами в захваченном кадре. Фигуры будут отброшены, если у них нет трех / четырех вершин соответственно или их внутренние углы нарушают правила, определенные выше.Следовательно, обнаруживается набор четырехугольников и треугольников, эти формы рассматриваются как дорожные знаки и записываются алгоритмом отслеживания модуля обнаружения. Для круглых дорожных знаков после извлечения контуров наша программа проверяет обнаруженные контуры, сопоставляя их формы с вычисленным эллипсом. Если более половины точек совпадают локально, эллипс-кандидат становится верифицированным. В процессе извлечения допускается геометрическая погрешность для каждой точки. Степень толерантности адаптивно меняется в зависимости от размера каждого эллипса.На рисунке 4 показан процесс проверки эллипса. Чтобы стабилизировать результат обнаружения и минимизировать количество ложных приемов, используется механизм слежения за дорожными знаками, обнаруженными на захваченных видео. Кольцевой буфер создается для каждого успешно обнаруженного дорожного знака, ограничивающий прямоугольник и центральная точка записываются в соответствующий кольцевой буфер. В следующем кадре, когда фигура обнаружена в аналогичном месте, будет использоваться тот же круговой буфер, а также его ограничивающий прямоугольник и центр…
Изготовитель принципиальной схемы esp32. Необходимо добавить цепь LC-фильтра рядом с выводом питания, чтобы подавить высокочастотные гармоники. Вот настольное приложение, которое определяет, когда я нахожусь на собрании Zoom, WebEx или Microsoft Teams, и автоматически включает или выключает мой знак. ESP32 — это наиболее интегрированное решение для приложений Wi-Fi + Bluetooth в отрасли с менее чем 10 внешними компонентами. 0 282 1 минута на чтение. Используя ШИМ в ESP32, вы можете управлять яркостью светодиода, устанавливать положение серводвигателя и регулировать скорость двигателя постоянного тока.ардуино. Исходный код этого проекта можно найти в моем хабе git. 2017-01-22. Выходные данные встроенного LDO выведены на 6 июня 2018 г. · Эти инструменты позволяют студентам, любителям и профессиональным инженерам проектировать и анализировать аналоговые и цифровые системы еще до создания прототипа. 2 доллара за 10 печатных плат (любого цвета): https: // jlcpcb. 5 Конструкция Плата ESP32 DevKitC монтируется на макетной плате, как показано на рисунке 5. В этом руководстве мы узнаем, как использовать ШИМ в ESP32 SoC. 10 августа 2021 г. · Изучите ESP32 с Arduino: кодирование Arduino, кодирование ESP32, принципиальная схема, проекты IoT, MQTT.Администратор 7 мая 2018 г. 6 августа 2021 г. · Схема цепи датчика pH IoT: в верхнем левом углу вы можете увидеть регулируемый источник питания 5 В, который используется для подачи 5 В на модуль ESP32. Подключение и прошивка ESP32-WROVER, ESP WROOM 32 с USB TTL UART и ESP32 Download Tool ESP32, разработанный ESPESSIF systems и некоторыми другими модулями и платами разработки. 07 июля 2019 г. · Плата ESP-Prog Board является официальной отладочной платой Espressif, создателей микросхемы ESP32. — Приветствую вас на моем личном блоге, в этот период я собираюсь научить вас создавать принципиальные схемы Arduino.Видео ниже, которое рассматривает все и затем исходный код / диаграммы. Учебники по M5Burner, Прошивка, Запись, программирование. ESP8266 на самом деле является микроконтроллером сам по себе, но имеет очень ограниченные функции, поэтому рекомендуется подключать его к другому микроконтроллеру, например, Arduino, с помощью AT-команд либо через 10 декабря 2019 г. · TinyCAD — это программа для рисования электрических схем, обычно известны как схематические рисунки. EasyEDA — это бесплатный онлайн-инструмент для проектирования электронных схем и печатных плат.ESP32 WROOM 32 — это универсальный модуль микроконтроллера с низким энергопотреблением и Bluetooth с Wi-Fi, который обеспечивает широкий спектр приложений, от сетевых датчиков с низким энергопотреблением в Учебном пособии по датчикам Холла для Arduino Esp8266 и Esp32. 2 сентября 2020 г. · Метод 1) Сопряжение ЖК-модуля 16X2 с ESP 32 без использования адаптера I2C. 22.01.2017 · ESP32 — мигающий с функцией задержки. самая сложная часть — это схема минимальной конфигурации. Распиновка ESP32 DevKitC оптимизирована для создания прототипов на макетной плате.Дизайн является открытым исходным кодом — схема и компоновка печатной платы находятся в открытом доступе. Мы подключим наш ESP32 к сети Wi-Fi, а затем создадим веб-страницу через IP-адрес и порт, которые отображаются на последовательном мониторе. 1 Функциональная блок-схема 12 2 Расположение выводов ESP32 (QFN 6 * 6, вид сверху) 13 3 Расположение выводов ESP32 (QFN 5 * 5, вид сверху) 14 4 Схема питания ESP32 18 5 Время включения и сброса ESP32 19 6 Настройка и Время удержания фиксирующего штифта 21 7 Структура сопоставления адресов 23 8 QFN48 (6×6 мм) в корпусе 48 9 QFN48 (5×5 мм) в корпусе 48 10 ESP32 Номер детали 49 Espressif 29 ноября 2021 г. · Принципиальная схема GPS-приемника на базе ESP32 показана на Инжир.1. ИС MAX30102 является обновлением микросхем MAX30100 и MAX30101. ESP32 объединяет антенный переключатель, ВЧ балун, усилитель мощности, малошумящий усилитель приема, фильтры и модули управления питанием. Контакт цифрового выхода подключен к контакту ESP32 GPIO22. Электрическая схема. это все, что вам нужно. Здесь я использовал 3. Контур. Все, что вам нужно, это браузер и стабильное интернет-соединение. Если вы хотите использовать внешний источник питания, вам понадобится этот источник питания, и вам нужно будет подключить провод от выхода регулятора 7805 к контакту 5 В модуля ESP32 WiFi + Bluetooth.Схема проектирования с помощью EdrawMax. Он также часто используется для рисования однолинейных диаграмм, блок-схем и презентаций. Справочная документация по продуктам M5Stack. Создаете ли вы прецизионные настольные весы для непрерывного взвешивания или любые другие […] 4 октября 2020 г. · ESP32 Oled SSD1306 Принципиальная схема и программирование — это очень базовое руководство для начала работы, в котором вы узнаете, как взаимодействовать с SSD1306 Модуль дисплея Oled с модулем ESP32 WiFi + Bluetooth; и отобразить значение потенциометра на поддерживаемом модуле дисплея 128×64 Oled SSD1306 I2C.26 августа 2018 г. · WiFi-модуль ESP8266-01. — GitHub — Makerdemy / Advanced-ESP32: этот репозиторий содержит все ресурсы, включая коды, принципиальные схемы и обучающие ссылки для курса MAKERDEMY под названием Advanced ESP32. Иван Паунович. SmartDraw — это самый простой инструмент для создания принципиальных схем на рынке сегодня. ESP8266 — это недорогая плата Wi-Fi, которую вы можете легко подключить к микроконтроллеру и подключить любой проект, который вы создаете, к Интернету. Я хочу использовать: 5-метровые светодиоды WS2812B (30 светодиодов / м, всего 150 светодиодов, 45 Вт) 4700 мкФ — 1000 мкФ не было в наличии, когда я размещал заказ, но я думаю, что этот должен быть в порядке (neopixel рекомендует его) IA хорошо продуманная схема дизайн может внести ясность в запутанную систему и предоставить удобный визуальный ориентир.Вот техническое описание MAX30102 (веб-сайт MAXIM). В этом экспериментальном проекте показано, как создать простой и недорогой анализатор пакетов WiFi (также известный как сниффер WiFi). Circuit Diagram — бесплатное приложение для создания электронных схем и экспорта их в виде изображений. Напротив, ESP32 объединяет два 12-битных АЦП (разрешение: 212 = 4096 2 12 = 4096), поддерживающих в общей сложности 18 портативных устройств для измерения цен на акции с использованием ESP32. EdrawMax — это профессиональный производитель принципиальных схем, призванный помочь вам легко и быстро разрабатывать высококачественные принципиальные схемы.Вот принципиальная схема Arduino UNO: здесь вывод D0 подключается к цифровому выводу 2 Arduino. 4 октября 2020 г. · ESP32 Oled SSD1306 Принципиальная схема и программирование — это очень простое руководство для начала работы, в котором вы узнаете, как подключить модуль дисплея SSD1306 Oled к модулю ESP32 WiFi + Bluetooth; и отобразить значение потенциометра на поддерживаемом модуле дисплея 128×64 Oled SSD1306 I2C. После этого мы узнаем, как проверить, правильно ли работает новый ESP32.11 захват сетевых пакетов для дальнейшего использования Хорошо продуманная схема может внести ясность в систему, которая в противном случае сбивает с толку, и обеспечить удобную визуальную справку. 6 Блок-схема Ядро и генератор ПЗУ памяти SRAM RNG Встроенные флеш-таймеры Рис. 1: Функциональный этап 5: Блок-схема. Встроенный КРАСНЫЙ светодиод на плате загорается после подключения платы. Он поддерживает стандартные и пользовательские библиотеки символов. 09 мая 2020 · Принципиальная схема — Todo. 97 20 сен, 2020 · MAX30100 IC — это интегрированный модуль пульсовой оксиметрии, два светодиода, фотодетектор, оптимизированная оптика и обработка аналогового сигнала с низким уровнем шума, предназначенная для носимых устройств и медицинских устройств.Подробный обзор того, как воспроизводить WAV с SD без использования сторонних библиотек для передачи WAV в I2S. Это удобный инструмент, доступный как для браузера, так и для настольного компьютера. 10 августа 2021 г. · Изучите ESP32 с Arduino: кодирование Arduino, кодирование ESP32, принципиальная схема, проекты IoT, MQTT Я хочу рассказать о некоторых причинах, по которым, на мой взгляд, ESP 32 — невероятный микроконтроллер и почему вы должны использовать это в ваших проектах IoT. Принципиальная схема весов ESP32 HX711. 6. Принципиальная схема Для создания электрических схем или принципиальных схем с нуля используйте инструмент для рисования принципиальной схемы.Схема для этого урока очень проста, так как нам нужно будет только подключить один вывод ESP32 к зуммеру, а другой к датчику движения PIR. В этом методе мы подключаем ЖК-модуль к ESP с помощью 12 соединительных проводов от 16 контактов на ЖК-дисплее. EasyEDA — это бесплатная и простая в использовании программа для проектирования схем, моделирования схем и проектирования печатных плат, которая работает в вашем веб-браузере. В этой статье мы обсудим, как заблокировать нажатие кнопки с помощью прерываний и таймеров. 5 В. Дисплей TFT ILI9163 работает с пятью контактами, кроме контактов VCC, LED и GND.Шаг 2: Откройте приложение Arduino на своем ПК, выберите «Инструменты»> «Плата» в верхнем меню и нажмите «ESP32 Arduino». Шаг 1. Подключите плату ESP32 к компьютеру с помощью кабеля micro-USB. 4 сентября 2018 г. · Узнайте, как создать веб-страницу для управления модулем реле с помощью ESP32. Автор Рави Теджа. это наверное глупый вопрос, но после проверки множества проектов я все еще в замешательстве. Концепция протокола атрибутов (ATT) и общего профиля атрибутов (GATT) здесь не обсуждается, но доступна на портале специальной группы по интересам Bluetooth (SIG).Любители электроники, а также профессионалы часто используют имитаторы электрических цепей для разработки и проверки принципиальных схем. 5: Принципиальная схема GPS-приемника на базе ESP32. 3. Исходный код. 97 Ссылка АЦП на ESP32. Мы знаем, что для воплощения прекрасных идей в реальные продукты вам нужны инструменты дизайна, которые не будут ограничивать ваше воображение и сдерживать вас. Самое лучшее в онлайн-симуляторе — это то, что вам не нужно вообще ничего устанавливать на свой компьютер или ноутбук. 3 февраля 2020 г. · Когда мы используем микроконтроллер ESP8266 или ESP32 с рабочим напряжением 3.Схема для этого проиллюстрирована ниже на рисунке 1. Так что вы всегда можете получить замену, прежде чем внедрять ее в проект. Принципиальная электрическая схема. Подробное описание ESP32-C3 уже доступно. Подключите ESP32 к смартфону с помощью адаптера USB OTG. Описание: Одна из первых полнофункциональных оценочных плат, которая содержит несколько контактных разъемов, микропереключатели, интерфейс последовательного программирования USB, кнопки сброса и режима загрузки, переключатель питания, 10 сенсорных панелей и отдельный заголовок для подключения ЖК-экрана.Мы используем ESP32 на нашем новом Kickstarter, BC24. Я хочу сделать проект светодиодной ленты управляемым ESP32. В этом проекте мы собираемся управлять релейным модулем с помощью ESP32. Если вы создаете упрощенную графическую схему или принципиальную схему для технически продвинутых сотрудников, наш конструктор принципиальных схем может вам помочь. Полный код находится на Github, щелкните здесь. Этот функциональный генератор может работать от источника +5 В, хотя его внутренняя схема работает на 2. Добавьте символы схем, переключатели, реле и многое другое.Микроконтроллеры ESP32 и ESP8266 поддерживают протокол I2S, тогда как только некоторые специальные микроконтроллеры Arduino поддерживают протокол связи. 15 апреля 2018 г. · ESP32 Tutorial: Debouncing a Button Press using Interrupts. Вот код Arduino, который работает на ESP32. Inst 4 августа 2020 г. · Вот принципиальная схема для взаимодействия датчика температуры DS18B20 и OLED-дисплея с ESP32 с использованием кода MicroPython. Вывод на ЖК-дисплей Регулируемый источник питания 5 В используется для питания модуля ESP32 WiFi Bluetooth и всей другой электроники.Это первое из нового набора руководств SwitchDoc Labs по использованию ESP32, следующего за популярным ESP8266. 18.02.2019 · Таблица 1. Справочная информация. Во-первых, ESP 32 очень мощный. Это охватывает установку, основные операции и пошаговый пример. Этот метод относительно сложен по сравнению с другим методом, поскольку он включает в себя связку соединительных проводов, которая выделяет большее количество контактов на ESP32. Значит, этот умный чип поддерживает IEEE802. В приведенном ниже скетче Arduino используется прерывание, поэтому микроконтроллер всегда первым обнаруживает MQ-4.Д. Ардуино. 19 июня 2020 г. · Конструктор схем Arduino. 7 мая 2018 г. · ESP32 DevKitC содержит всю базовую схему поддержки ESP-WROOM-32, включая мост USB-UART, кнопки сброса и режима загрузки, регулятор LDO и разъем micro-USB. Самый простой способ создать графический интерфейс пользователя (GUI) для визуализации температуры и влажности с помощью Arduino и датчика DHT в обработке. Мы собираемся использовать связь I2C с сенсорным модулем BME280. Circuitmaker — это уникальное сочетание широкого сообщества разработчиков, бесплатного программного обеспечения и услуг для проектирования печатных плат, которое позволяет каждому работать в одном и том же месте и с легкостью делиться знаниями.В него встроены 2. Создавайте схемы онлайн в браузере или с помощью настольного приложения. Это простой инструмент, которым могут пользоваться инженеры, преподаватели, студенты и фанаты. 6 Блок-схема Ядро и генератор ПЗУ памяти SRAM RNG Встроенные флеш-таймеры Рис. 1: Функциональный конденсатор. A 4. Ратиометрические датчики на эффекте Холла, интерфейс Arduino. Платы могут быть 10 октября 2017 г. · Рисунок 5. Выход TMP36 подключен к контакту GPIO 4. Если вы разрабатываете прецизионные настольные весы для непрерывного взвешивания или любые другие весы […] ESP32 — это высокоинтегрированное решение для приложений Wi-Fi и Bluetooth IoT с около 20 внешними компонентами.Этот проект показывает, как подключить светодиод к ESP32 и написать простую программу, которая заставит светодиод мигать. Мы узнаем о требованиях к питанию модуля и универсальных функциях ввода-вывода. JTAG-соединения. Следуйте одной из следующих схематических диаграмм. Сердцем этого проекта является WiFi-модуль ESP32, способный работать в неразборчивом режиме. Пожалуйста, соблюдайте соответствующие меры безопасности при работе с высоким напряжением. 14 ноября 2015 г. · В семейство ESP32 входят микросхемы ESP32-D0WDQ6 (и ESP32-D0WD), ESP32-D2WD, ESP32-S0WD и система в пакете (SiP) ESP32-PICO-D4.Резистор 7 кОм используется в качестве подтягивающего резистора и подключается между выводом цифрового выхода и выводом VCC. Для повышающего преобразователя 5 В я позаимствовал один из дешевого китайского одноэлементного блока питания, преимущество использования такого повышающего преобразователя заключается в том, что он имеет встроенную схему зарядного устройства и функцию отключения при пониженном напряжении. Он поддерживает программы компоновки печатных плат с несколькими форматами списков соединений, а также может создавать списки соединений моделирования SPICE. Тесты проводились с использованием модуля ESP32 от DFRobot, интегрированного в отладочную плату ESP32.27 ноября 2021 г. · Принципиальная схема. 17 февраля 2021 г. · Распиновка ESP32. 3 Принципиальная схема проекта 5. Шаг 5: Блок-схема. ESP32 объединяет антенный переключатель, ВЧ балун, усилитель мощности, малошумящий приемный усилитель, фильтры и модули управления питанием. Если ESP32 подключен к Wi-Fi, вы можете управлять модулем реле с помощью приложения Blynk. В этом руководстве мы отправим показания датчика BME280 в базу данных Firebase Realtime. Номинальный ток индуктора предпочтительно составляет 500 мА и выше.cc. Принципиальная схема: 6 сентября 2016 г. · — Вт 6 сентября 2016 г. 9:44 # 54582 Я попытался найти инструмент для создания схем, особенно бесплатный, и онлайн-инструмент для рисования схем. Щиток оснащен датчиком BME280 (температура, влажность и давление), LDR (светозависимым резистором), датчиком движения PIR, светодиодным индикатором состояния, кнопкой 4 августа 2020 г. — В этом видео показан доступный способ добавления поддержки USB. создавать проекты. Благодаря огромной коллекции символов электронных схем и готовых шаблонов создание принципиальных схем больше не является проблемой.Магнитное поле. Мы предлагаем программный инструмент, веб-сайт сообщества и услуги в духе Processing и Arduino, способствуя созданию творческой экосистемы, которая позволяет пользователям документировать свои прототипы, делиться ими с другими, обучать электронике в классе, а также разрабатывать и производить профессиональные печатные платы. 10 декабря 2019 г. · TinyCAD — это программа для рисования схем электрических цепей, обычно называемых схематическими чертежами. Магнитный двигатель. 22 мая 2020 г. · Если ваш проект требует только обнаружения метана, достаточно будет считывать вывод D0.Я пытаюсь сделать печатную плату как можно более тонкой, и добавление перемычки сделает ее немного больше по ширине, я думал, что UART (JP1) предназначен для загрузки кода в модуль esp, поскольку он подключен к TXDO и RXDO или на этой схеме он служит только для подключения питания? 27 ноября 2020 г. · ESP32-C3 — это одноядерный 32-разрядный микроконтроллер на базе RISC-V с 400 КБ SRAM, способный работать на частоте 160 МГц. И сегодня это может быть первичный образ: Electronic Weighing Machine Arduino Project Hub от разработчика принципиальных схем Arduino, источник: create.01 декабря 2020 г. · Принципиальная схема генератора треугольных волн: Работа генератора треугольных волн с использованием таймера 555: В этой схеме таймер 555 работает в нестабильном режиме мультивибратора. 1 показана функциональная блок-схема процессора ESP32 (см. Техническое описание ESP32, Espressif Systems, 2017). Аккумуляторный источник питания 7V для схемы. 3 В, мы должны использовать выход VIN или 5 В от USB-соединения в качестве источника питания для модуля реле и питания платы ESP8266 или ESP32 через USB. 8 декабря 2016 г. · Онлайн-тренажеры становятся все популярнее с каждым днем.Специальная услуга Bluetooth. Он состоит из ESP-WROOM-32 в качестве основной платы и дополнительно нескольких контактов и компонентов для удобного взаимодействия с ESP32. Портативное устройство для мониторинга цен на акции с использованием ESP32. Средний Полные инструкции предоставлены 1 час 3 213. ESP32 с BME280. В этом режиме он постоянно переключает выходной сигнал с низкого на высокий, создавая выходной сигнал прямоугольной формы. 1 Сравнение ESP32 и ESP8266 1. 23 января 2017 · 2018-12-17. джилда. Учебное пособие о том, как использовать Fritzing для создания графических схем и схем подключения.Этот сайт предназначен для обмена символами схемотехники для TinyCAD. Микросхемы ATmega, используемые Arduino Uno (ATmega328) и Arduino Leonardo (ATmega32U4), имеют 10-разрядные АЦП, которые обеспечивают аналого-цифровое разрешение 210 = 1024 2 10 = 1024. Таким образом, все решение занимает все необходимое. минимальная площадь печатной платы (PCB). com (спонсор) CH559 — архитектор 8051 2 сентября 2020 г. · Метод 1) Сопряжение ЖК-модуля 16X2 с ESP 32 без использования адаптера I2C. Он должен дать вам достаточно подробностей, чтобы добавить это в ваши собственные проигрыватели кода / wav.Принципиальная схема весов. Рекомендуется использовать внешний 3. TinyCAD — это программа с открытым исходным кодом для рисования принципиальных схем, работающая под Windows. ESP32-D0WDQ6-V3 (NRND) и ESP32-U4WDH основаны на ECOV3wafer. На следующем рисунке показана проводка между наиболее часто используемыми микроконтроллерами Arduino, ESP8266 и ESP32 и модулем реле. Теперь включите питание 5 В постоянного тока и 110 В / 220 В переменного тока. ESP32 — это серия недорогих систем с низким энергопотреблением на микросхеме микроконтроллеров со встроенным Wi-Fi и двухрежимным Bluetooth.На этой схеме показано, что ESP32 имеет двухъядерный процессор, область чипа, которая контролирует WiFi, и другую область, которая контролирует Bluetooth. В серии ESP32 используется микропроцессор Tensilica Xtensa LX6 как в двухъядерном, так и в одноядерном вариантах, двухъядерный микропроцессор Xtensa LX7 или одноядерный микропроцессор RISC-V и включает встроенные антенные переключатели, ВЧ балун, усилитель мощности, малошумный прием 05 января 2021 · Проводка ESP32 + WS2812B. Я заглянул в Easy EDA, выглядит неплохо. 4. Это включает макет и дизайн платы, создание прошивки и 13 октября 2019 г. · @ kowshik1729 сказано в Схеме дизайна для esp32 :.21 августа 2020 г. · ESP32 I2S Часть 3 — Воспроизведение Wav с SD-карт. Вот как это работает. 2. 16 июня 2020 г. · Печатная плата ESP32 IoT Shield с приборной панелью для выходов и датчиков. 24 сентября 2021 г. · Современные конструкции весов часто требуют. Я вкладываю немного денег в фондовый рынок, и мне нужно было постоянно следить за своими запасами, поэтому я сделал свое собственное устройство для мониторинга запасов. Он содержит двухъядерный ЦП с тактовой частотой 8160 или 18 февраля 2019 г. · Таблица 1. Он содержит двухъядерный ЦП с тактовой частотой 8160 или Эту схему также называют прямым цифровым синтезатором.4. Программное обеспечение для принципиальных схем VP Online позволяет быстро приступить к работе и быстро завершить работу благодаря богатому набору форм принципиальных схем, широкому набору шаблонов принципиальных схем и интуитивно понятному редактору схем. Он также часто используется для рисования однолинейных диаграмм, блок-схем и презентаций. 24 сентября 2017 г. · Схема подключения тостера. Схема подключения двигателя. Esp32 Bluetooth Reflow Oven Hackster Io A567f. Схема подключения двигателя хлебопечки. Цифровые ресурсы 11 мая 2021 года. · Подключите бытовую технику к релейному модулю согласно принципиальной схеме.Используя веб-страницу, мы отправим команды на ESP32 для включения 7 мая 2018 г. · Принципиальная схема демонстрационной платы ESP32 V2. Кроме того, вы можете рисовать и обсуждать принципиальную схему в любом месте с подключением к Интернету, потому что VP Online — 29 ноября 2021 г. · Принципиальная схема GPS-приемника на базе ESP32 показана на рис. Откройте схему соединений или шаблон чертежа, а не просто пустой экран. Wi-Fi 4 ГГц и Bluetooth 5 (LE) с поддержкой большого радиуса действия. 12 марта 2021 г. · 12 марта 2021 г. Онлайн-схемотехника позволяет любителям легко делиться своими проектами и обсуждать их, в то время как онлайн-моделирование схем позволяет быстро повторять дизайн и ускорять изучение электроники.20 сентября 2020 г. · MAX30100 IC — это интегрированный модуль пульсоксиметрии с двумя светодиодами, фотодетектором, оптимизированной оптикой и малошумящей обработкой аналогового сигнала, предназначенный для носимых устройств и медицинских устройств. Fritzing — это аппаратная инициатива с открытым исходным кодом, которая делает электронику доступной в качестве творческого материала для всех. На следующем изображении показана распиновка 30-контактной платы разработки ESP32 DevKit. Реле управления ESP32 с приложением Blynk. Программа для рисования схем SmartDraw работает с вами, а не против вас.Схема выводов аналогового источника питания ESP32 показана на рисунке 3. Я хочу остановиться на некоторых причинах, по которым, на мой взгляд, ESP 32 — невероятный микроконтроллер, и почему вы должны использовать его в своих проектах IoT. Рабочий цикл прямоугольной волны должен составлять 50%. Рис. Одна из популярных плат разработки ESP32, доступная сегодня, — это 30-контактная версия, показанная на изображении выше. 2 Архитектура ESP32 Рис. 1. Он имеет 22 программируемых GPIO с поддержкой ADC, SPI, UART, I2C, I2S, RMT, TWAI и PWM.Установите ESP32 Wifi Balancing Robot из Google Playstore; Откройте приложение, в строке меню выберите значок «Схема и код»; Выберите настройки меню, в опции «Загрузить прошивку» выберите USB OTG, если вы хотите подключить балансирующего робота к сети маршрутизатора, вы можете установить имя SSID и пароль. . 2. Я создаю с нуля комплект для разработки электронных документов на основе ESP32 и показываю весь процесс. Он работает как инструмент схемы подключения, поскольку содержит все важные инструменты и компоненты, необходимые для создания хорошего чертежа проводки.Литий-ионный аккумулятор 7V 18650, собранный из старого ноутбука емкостью 2000 мАч. пользователя Лукаш Подкалицкий. 7 мая 2021 г. · Схема управления светодиодом с помощью встроенного модуля Bluetooth ESP32. В этом проекте мы покажем вам, как построить печатную плату экрана Интернета вещей для ESP32 и панель управления веб-сервером для управления им. Узнаем про ESP32 и его подробные характеристики. ˘ ˇ ˆ ˙ ˝ ˛ 12 окт.2019 г. · Hi @ZeeZa ,. Разработчику доступны все важные GPIO. Вам нужно создать собственную плату с ESP32 SoC и MPU6050 IMU, верно? Во-первых, вам нужно выбрать подходящий ESP32 SoC из множества моделей, после этого с помощью таблицы данных выяснить минимальную схему конфигурации для SoC и добавить модуль MPU6050.Создавать библиотеки графических образов схем в TinyCAD легко, но отнимает много времени. 5. io. 4: Авторский прототип. Быстрый старт, получите подробную информацию или инструкции, такие как IDE, UIFLOW, Arduino. PDF-файл даст вам … Создать принципиальную схему онлайн. Форма волны генерируется на выводе VOUT, в то время как микроконтроллер взаимодействует с выводами SPI SCLK и SDATA. Учебное пособие по датчику холла на Arduino с кодом и схематической диаграммой, как использовать maker pro с помощью программы для электронной лаборатории com ky 003 магнитный модуль steps2make тахометр для определения сопрягаемого поля, построенный тахометр a3144, измеряет вращение от SmartDraw — это самый простой производитель принципиальных схем на рынке сегодня.Этот репозиторий содержит все ресурсы, включая коды, схемы и обучающие ссылки для курса MAKERDEMY под названием Advanced ESP32. Стандартно SIG установила профили для распространенных приложений BLE, таких как мониторы здоровья и тренажеры. Это руководство по ESP32 PWM содержит всю важную информацию для настройки PWM в ESP32. Найдите этот и другие проекты оборудования на Hackster. PDF даст вам … О схемотехнике. Электронная схема, Электронная схема, Arduino, Компоновка печатной платы, Проектирование схем, Программное обеспечение Arduino, Nodemcu, Esp32, Учебные пособия, Инженерия, Технологии, Наука Оживите свои 3D-проекты с помощью Сборок схем с помощью Tinkercad.Итак, вам нужно подключить датчик BME280 к вашей плате. Он также имеет аппаратное ускорение для шифрования, которое позволяет подключаться к LoRa, сети дальней связи, которая позволяет подключаться на расстоянии до 15 км с помощью антенны. Создайте графический интерфейс для визуализации температуры и влажности для Arduino. Информация о RGB LD Strips на Adafruit — ссылка 22 августа 2020 г. · I2S означает Inter-Integrated Circuit Sound, а в качестве интерфейса электрической последовательной шины I2S является стандартом для подключения различных цифровых аудиоустройств. В его основе лежит двухъядерный или одноядерный микропроцессор Tensilica Xtensa LX6 с тактовой частотой до 240 МГц.Изготовитель схем esp32
p7l l5e c7z iua a6k btn 4yc hpi bnc 25s 5np ynf n8x glk 2j0 be0 gcy cds 43l ygf
Глава 3 — План обеспечения непрерывности ИТ-бизнеса
План обеспечения непрерывности бизнеса
Если вы введете в Google поиск по запросу «План обеспечения непрерывности бизнеса», то получите обширный список подходов к восстановлению после катастрофы — рокового дня, когда все рушится. Информации много, но мой лучший совет — KEEP I.Т. ПРОСТОЙ . По своей сути, план обеспечения непрерывности ИТ-бизнеса включает в себя следующее: оценка / объявление аварии, подтверждение статуса безопасности, оценка подсистем и выполнение подробной оценки командой восстановления ИТ.
Непрерывность бизнеса — Формат документа
Итак, где собственно восстановление ИТ-ресурсов? Это делается с помощью плана аварийного восстановления в сочетании со сценариями восстановления. BCP будет включать требования к восстановлению процесса на основе приоритетов, определенных в BIA.Он будет служить только для проверки выполнения этих действий по восстановлению.
Простой подход к решению проблемы BCP заключается в разработке его в виде простого контрольного списка. В целом использование списка — отличный способ упростить рабочий день, а бизнес — более продуктивным. Контрольные списки помогают уменьшить количество ошибок и обеспечить последовательность и полноту выполнения плана.
Прежде чем мы углубимся в контрольный список BCP, я должен подчеркнуть необходимость «надежного» анализа воздействия на бизнес (BIA).Я выделил слово «надежный», потому что он жизненно важен для успеха стратегии непрерывности бизнеса. BIA является основой стратегии непрерывности бизнеса. Без эффективного BIA легко, так сказать, выстрелить себе в ногу.
Небольшой отказ от ответственности: помните, что ИТ-специалисты не несут ответственности за усилия по восстановлению после зомби-апокалипсиса. Это проблема отдела окружающей среды, здоровья и безопасности (EHS). На протяжении всей книги мы будем планировать восстановление бизнес-процессов, зависящих от ИТ-ресурсов — ресурсов, которые ИТ-служба может контролировать или на которые возложены обязательства со стороны тех, кто может.
В этой главе мы рассмотрим План обеспечения непрерывности бизнеса ИТ с использованием подхода из девяти этапов контрольного списка, который просто означает, что список шагов выполняется логически и отмечается по мере продвижения вниз по списку.
План обеспечения непрерывности бизнеса
План обеспечения непрерывности бизнеса ИТ (для центров обработки данных ИТ) начинается со всех обычных разделов:
- Цель
- Объем
- Обязанности
- Контакты бизнес-подразделения ИТ
- Бизнес-сайты
- Расположение ИТ-центра обработки данных
Я не буду вдаваться в подробности того, что входит в эти разделы, поскольку эту информацию можно получить из нашего старый друг, BIA, обсужденный в главе 2.
Несмотря на то, что ПП разделен на девять этапов, не все бедствия требуют попадания в подземный бункер, ПП рассматривает только два возможных сценария (уровни охвата):
- ИТ-центр обработки данных Уровень — авария, которая затрагивает весь ИТ-центр обработки данных или его важную часть.
- Системный уровень — Авария, затрагивающая определенную систему.
BCP не учитывает инциденты, которые практически не влияют на бизнес-цели.Однако он включает непредвиденные события, которые, согласно BIA, могут повлиять на ключевые бизнес-процессы. В зависимости от уровня масштабов стихийного бедствия (сбой в ИТ-центре данных или сбой в системе) вы выполняете либо все девять этапов, либо этапы 1 плюс этапы 6–9 BCP.
План обеспечения непрерывности бизнеса является частью семейства документов, которые также включают план аварийного восстановления и сценарии аварийного восстановления. В целом план обеспечения непрерывности ИТ-бизнеса представляет собой небольшой документ (15-20 страниц), который поможет вам выполнить конкретные шаги по восстановлению.Они рассматривают безопасность и внешние ресурсы, такие как физическая безопасность, электроэнергия и условия окружающей среды. (Под внешним, я имею в виду внешнее по отношению к ИТ-отделу, но все еще в рамках бизнеса.) Эти начальные этапы (этапы 2-5) очищают путь к оценке группы восстановления ИТ (этап 6), выполнению процедур и аварийной ситуации. Сценарии восстановления (этап 7), необходимые для восстановления ИТ-ресурсов (этап 8) и их системы / данных (этап 9). Включение этапов внешнего ресурса не обязательно.Если вы понимаете, что ваш бизнес полагается (или не полагается) на какой-либо другой внешний ресурс, не стесняйтесь включать / удалять его.
Иерархия документов
Все эти документы связаны друг с другом как часть стратегии обеспечения непрерывности бизнеса.
Фактическое выполнение этапов BCP распределяется между документами BCP, DRP и DRS следующим образом:
- План обеспечения непрерывности бизнеса охватывает этапы 1–5.
- Этапы 6-7 BCP выполняются с использованием плана аварийного восстановления.Этапы 6-7, указанные в BCP, используются для проверки их выполнения.
- Этапы 8–9 BCP выполняются с использованием сценариев аварийного восстановления. Этапы 8-9, указанные в BCP, используются для проверки их выполнения.
Этот BCP представляет собой простой, хорошо продуманный и протестированный контрольный список, который используется для выполнения всех необходимых действий, связанных с восстановлением ключевых бизнес-процессов и лежащих в их основе ИТ-ресурсов. Ниже приведена диаграмма, на которой показано, как BCP разделен на девять этапов.
9 этапов плана обеспечения непрерывности бизнеса
Девять этапов плана обеспечения непрерывности ИТ-бизнеса
Как вы можете видеть на начальном изображении к этой главе, полный контрольный список для плана обеспечения непрерывности бизнеса разделен на девять этапов. Исходная информация для этих этапов изначально собиралась на этапе BIA.
Девять ступеней:
- Оценка / объявление аварии
- Безопасность
- Физическая безопасность
- Электроэнергия
- Условия окружающей среды
- Группа ИТ-восстановления
- Процедуры и сценарии аварийного восстановления
- ИТ-ресурсы
- Восстановление системы и данных
Эти девять этапов основаны на наиболее распространенных требованиях к восстановлению ИТ-центра обработки данных.Этапы 3-5 — это подсистемы, которые поддерживают ресурсы ИТ-центра обработки данных и могут потребоваться, а могут и не потребоваться в соответствии с вашим конкретным бизнес-сценарием. Вы можете обнаружить, что дополнительные подсистемы поддерживают ваши ИТ-ресурсы, и решите включить их. Это нормально и ожидаемо. Помните, это отправная точка. Куда вы это сделаете, зависит от вас.
На протяжении всего Плана обеспечения непрерывности бизнеса каждый из этих этапов далее рассматривается, задавая вопросы здравого смысла, на которые необходимо ответить, прежде чем переходить к следующему этапу.Этапы служат в качестве паузы для подтверждения текущего состояния ключевых бизнес-процессов, ИТ-ресурсов и внешних ресурсов, которые их поддерживают. Подход с использованием контрольного списка обеспечивает рабочий процесс восстановления, основанный на информации, которая была ранее определена в BIA, которая в конечном итоге охватывает ключевые бизнес-процессы и ИТ-ресурсы, которые их поддерживают. Каждый из девяти этапов более подробно описан ниже. Также обратитесь к Приложению C для получения подробной схемы того, как эти документы соотносятся друг с другом.
Отношение стадии к типу документа
1. Оценить / объявить бедствие — (руководитель или координатор Британской Колумбии)
Мы мертвы в воде или удар повлиял только на часть наших операций? Немедленное воздействие необходимо оценить на ранней стадии. Что нас только что поразило? Было ли это Годзилла или это было нападение инопланетян? Очень важно определить, кто только что сделал наш день интереснее. Есть выжившие? Серверы домена работают? Есть ли стены вокруг ИТ-центра обработки данных? Это вопросы, на которые необходимо ответить, прежде чем сделать тревожный звонок высшему руководству и объявить о катастрофе.
На основе этой первоначальной оценки можно принять решение, будет ли восстановление выполняться на пораженном сайте или на дополнительном сайте. На этом этапе важна коммуникация, особенно четкая коммуникация с высшим руководством. В случае аварии ИТ-центра обработки данных уровня я рекомендую сделать заявление в течение двух часов после уведомления об инциденте, нарушившем нормальную работу бизнеса. Для аварии системного уровня время объявления будет основано на технической оценке на Этапе 6.
Быть в числе первых спасателей на месте бедствия не должно поставить вас в опасное положение. Прежде чем действовать импульсивно, проконсультируйтесь с отделом безопасности компании, прежде чем получить доступ к пострадавшей зоне, где находятся ИТ-ресурсы.
Перед катастрофой бизнес должен определить потребность во внутренних и внешних инструкциях по коммуникации, связанных со Стратегией непрерывности бизнеса. Ответственность за взаимодействие между командой восстановления ИТ и руководством будет возложена на руководителя BC и / или координатора BC.Отдел кадров сайта лучше всего справится с коммуникациями с внешними сторонами и регулирующими органами.
На данном этапе необходимо произвести предварительную оценку текущего воздействия. Это не всесторонний анализ всего, что было затронуто. Подробный анализ выполняется на этапе 6 группой восстановления ИТ. Лидер по обеспечению непрерывности бизнеса должен основывать свое решение о том, объявлять ли катастрофу, исходя из своего наилучшего суждения о текущей ситуации. Он / она может обратиться в группу ИТ-восстановления для получения предварительной рекомендации, но на этом этапе необходимы быстрые и точные действия.Как только случается бедствие, время начинает идти, отсчитывая максимальное допустимое время простоя (MTD), установленное в Анализе воздействия на бизнес.
Сообщая высшему руководству о бедствии, сообщение должно быть четким и кратким. Не пытайтесь объяснять техническую проблему, которая мешает успешному завершению бизнес-процесса. Объясните , что бизнес-процесс не работает и что группа ИТ-восстановления выполняет заранее запланированные и утвержденные действия в подобной ситуации.В два часа ночи руководство не хочет обсуждать технические проблемы вашего блейд-сервера.
Оцените и объявите нарушение непрерывности бизнеса
Следующая диаграмма является примером формата и содержания контрольного списка для Этапа 1 (Оценка / Объявление бедствия) в пределах BCP. Примечание: Фактические имена и номера телефонов указаны в официальном документе.
2. Безопасность
Кто-то может возразить, что этот этап должен быть первым, но слон просто наступил на наш ИТ-центр данных, поэтому нам сначала пришлось отступить и увидеть повреждения (этап 1). , а затем осмотреться и проверить выживших.Насколько безопасна команда ИТ-восстановления? Они доступны? Могут ли они безопасно покинуть свои семьи? Будут ли их семьи в безопасности, если они их бросят? На этом этапе вам необходимо иметь реалистичный взгляд на ситуацию. Ограничивается ли катастрофа центром обработки данных ИТ или это серьезная региональная катастрофа? Ответы на эти вопросы дадут вам лучшее представление о том, что группа ИТ-восстановления может быть недоступна, может не иметь доступа к дорогам или, что еще хуже.
Насколько безопасен сайт? Есть ли препятствия для доступа к ИТ-центру обработки данных? Требуются ли специальные халаты или защитная одежда? Ответы на эти вопросы имеют решающее значение для безопасной активации группы восстановления ИТ.Связь с группой быстрого реагирования также очень полезна, потому что они обычно первыми прибывают на место. Пришло время позвонить в группу восстановления ИТ.
Всегда заботьтесь о безопасности вашей группы восстановления ИТ. Нет смысла вызывать команду и в то же время подвергать свою жизнь опасности. Понять масштабы катастрофы. Смогут ли члены вашей команды работать так, как ожидалось, если они беспокоятся о семьях, которые остались позади? Помните, что вы не выиграете время, если поставите кого-то в опасное положение.
Оценка безопасности
Следующая диаграмма является примером формата и содержания контрольного списка для Этапа 2 (Безопасность) в пределах BCP. Примечание: Фактические имена и номера телефонов указаны в официальном документе.
3. Физическая безопасность
Как можно скорее установить связь с группой физической безопасности. Установите текущий статус безопасности на сайте. Действует ли система контроля безопасности? Требуются ли охранники в зоне ИТ-центра обработки данных? Неизвестные люди выбегают из здания с компьютерным оборудованием сайта? Охраняется ли физический периметр, включая парковку? Доступны ли аварийные контрольно-пропускные пункты? Куда переехать ИТ-специалистам в случае повторного землетрясения? Доступны ли кафетерий и туалеты? (Да, группе потребуются биологические перерывы!) Был ли определен командный центр, где группа ИТ-восстановления может взаимодействовать с другими группами на объекте во время усилий по восстановлению? (Должно было быть.) Понятно ли, какой персонал находится на объекте после того, как он покинет территорию Командного центра?
Команда безопасности должна быть в курсе стратегии восстановления. Существует очень высокая вероятность того, что эта команда первой узнает о последствиях стихийного бедствия. Эти охранники должны быть очень хорошо обучены и знать, как действовать после выявления последствий стихийного бедствия. Информация о том, кому звонить и , что и , что нельзя делать во время и после стихийного бедствия, очень важна.
Physical Security должен быть в состоянии повышенной готовности во время и после бедствия. Бизнес уязвим во время стихийного бедствия, и внешние организации могут рассматривать это как возможность получить доступ к ИТ-ресурсам вашего бизнеса.
Наличие Управления безопасностью при реализации стратегии восстановления также сэкономит вам время в дальнейшем, особенно когда вы начнете выполнять пошаговые инструкции и тестовые упражнения. По моему опыту, это та команда, которая вам нужна.
Подсистемы оценки (физическая безопасность, электроэнергия и условия окружающей среды)
Следующая диаграмма является примером формата и содержимого контрольного списка для этапа 3 (физическая безопасность) в BCP. Примечание: Фактические имена и номера телефонов указаны в официальном документе.
4. Электроэнергетика
Доступен ли надежный источник питания? Оцените источник электроэнергии для ИТ-центра обработки данных. Электроэнергия в настоящее время вырабатывается из ИБП, генератора объектов, общественной сети, или же солнечные батареи улетучились вместе с Алисой в Страну чудес? Есть ли достаточное освещение в ИТ-центре обработки данных? Каково рабочее состояние системы пожаротушения? Пожар в центре обработки данных ИТ с присутствием группы ИТ-восстановления может означать катастрофу, о чем не хотят слышать ни высшее руководство, ни команда ИТ-восстановления.Знайте, к кому обращаться в электротехнический отдел; не ожидайте, что ваша команда сможет перемещать электрическую проводку под напряжением. Помните, безопасность превыше всего. Все документы из этапов BCP включают текущие номера телефонов внутренних и внешних поставщиков услуг, которые могут потребоваться, поэтому используйте их!
Стихийные бедствия или антропогенные катастрофы могут иметь значительное влияние на электрические системы. В инженерных планах должны быть конкретные инструкции о том, как вернуть электрическую систему в рабочее состояние безопасно и эффективно.Перед стихийным бедствием должны быть приняты меры для уменьшения возможного повреждения электрических систем и сокращения времени восстановления. После стихийного бедствия важно оценить и отремонтировать энергосистему, уделяя особое внимание безопасности. Хотя ИТ-служба не несет ответственности за ремонт энергосистемы, она может предпринять некоторые действия, чтобы обезопасить ИТ-ресурсы и ограничить ущерб. В качестве меры предосторожности ИТ-ресурсы должны быть отключены и защищены, а критические компоненты должны быть отключены от источников питания.
Центр обработки данных ИТ должен быть защищен до катастрофического события, чтобы ограничить электрическое повреждение оборудования и систем.
Примеры задач по ограничению ущерба:
- Уберите основное оборудование с их базы и поднимите его над линией затопления.
- Отключите питание, чтобы предотвратить короткое замыкание и повреждение от дуги.
- Закройте ИТ-ресурсы пластиковой защитой.
- Поместите мешки с песком вокруг помещений с электрооборудованием, чтобы ограничить проникновение воды.
- Переместите критически важные компьютеры и электронное оборудование в безопасное место.
- Убедитесь, что запасные части доступны до того, как произойдет стихийное бедствие.
- Уберите с пола все критическое электрическое оборудование, чертежи, руководства и расходные материалы.
- Убедитесь, что плановое обслуживание выполняется в актуальном состоянии.
Следующая диаграмма является примером формата и содержания контрольного списка для Этапа 4 (Электроэнергия) в пределах BCP. Примечание: Фактические имена и номера телефонов указаны в официальном документе.
Продолжение главы…
Подробная информация в главе 3 — План обеспечения непрерывности ИТ-бизнеса — в книге.
2.3 Поведенческая психология — Введение в психологию — 1-е канадское издание
Дженнифер Валинга
Цели обучения
- Понять принципы бихевиористской психологии и их отличия от психодинамических принципов с точки зрения теории и применения.
- Различают классическое и оперантное кондиционирование.
- Познакомьтесь с ключевыми теоретиками и подходами бихевиористов.
- Определить применение бихевиористских моделей в современной жизни.
Возникнув в отличие от психодинамической психологии, бихевиоризм фокусируется на наблюдаемом поведении как средстве изучения человеческой психики. Основной принцип бихевиоризма состоит в том, что психология должна интересоваться наблюдаемым поведением людей и животных, а не ненаблюдаемыми событиями, которые происходят в их сознании.Бихевиористы критиковали менталистов за их неспособность продемонстрировать эмпирические данные в поддержку своих утверждений. Бихевиористская школа мысли утверждает, что поведение можно описать с научной точки зрения, не прибегая ни к внутренним физиологическим событиям, ни к гипотетическим конструкциям, таким как мысли и убеждения, что делает поведение более продуктивной сферой внимания для понимания психологии человека или животных.
Наибольшее влияние на бихевиористскую психологию оказал Иван Павлов (1849-1936), который исследовал классическое обусловливание, хотя часто не соглашался с бихевиоризмом или бихевиористами; Эдвард Ли Торндайк (1874-1949), который представил концепцию подкрепления и первым применил психологические принципы к обучению; Джон Б.Уотсон (1878–1958), отвергавший интроспективные методы и стремившийся ограничить психологию экспериментальными методами; и Б.Ф. Скиннер (1904–1990), проводивший исследования оперантного обусловливания.
Первый из них, Иван Павлов, известен своей работой над одним важным типом обучения, классической обусловленности . По мере обучения мы меняем то, как мы воспринимаем окружающую среду, как мы интерпретируем поступающие стимулы, и, следовательно, как мы взаимодействуем или ведем себя . Павлов, русский физиолог, на самом деле обнаружил классическую обусловленность случайно во время исследования пищеварительных паттернов у собак.Во время своих экспериментов он засыпал мясной порошок в пасть собаке, в различные органы которой вставляли трубки для измерения реакции организма. Павлов обнаружил, что у собаки началось выделение слюны до того, как ей дали мясной порошок. Вскоре у собаки началось выделение слюны, как только в комнату вошел человек, который ее кормил. Павлов быстро начал проявлять интерес к этому феномену и отказался от своих исследований пищеварения в пользу своего теперь известного классического исследования обусловливания.
По сути, открытия Павлова подтверждают идею о том, что мы развиваем реакции на определенные стимулы, которые не возникают в природе.Когда мы касаемся горячей плиты, наш рефлекс отводит руку назад. Мы делаем это инстинктивно, без обучения. Рефлекс — это просто инстинкт выживания. Павлов обнаружил, что мы создаем ассоциации, которые заставляют нас обобщать нашу реакцию на один стимул на нейтральный стимул, с которым он связан. Другими словами, горячая горелка = ой; плита = горелка; следовательно, плита = ай.
В своих исследованиях на собаках Павлов начал сочетать звук колокольчика с мясным порошком и обнаружил, что даже когда мясной порошок не подавался, у собаки в конечном итоге начиналось выделение слюны после того, как он услышал колокольчик.В этом случае, поскольку мясной порошок естественным образом вызывает слюноотделение, эти две переменные называются безусловным стимулом (UCS) и безусловным ответом (UCR) соответственно. В эксперименте звонок и слюноотделение не встречаются в природе ; собака приучена реагировать на звонок. Следовательно, звонок считается условным стимулом (CS), а слюноотделение на звонок — условным ответом (CR).
Многие из наших поступков сегодня формируются сочетанием стимулов. Запах одеколона, звук определенной песни или наступление определенного дня в году могут вызвать определенные воспоминания, эмоции и ассоциации. Когда мы создаем эти типы ассоциаций , мы испытываем классическое обусловливание .
Оперантное кондиционирование — это еще один тип обучения, который относится к тому, как организм действует в окружающей среде или как он реагирует на то, что ему представлено в окружающей среде (рисунок 2.12).
Рисунок 2.12 Оперантное кондиционирование.Примеры оперантного кондиционирования включают следующее:
Подкрепление означает усиливать и используется в психологии для обозначения любого стимула, который усиливает или увеличивает вероятность определенного ответа . Например, если вы хотите, чтобы ваша собака сидела по команде, вы можете угощать ее каждый раз, когда она садится за вас. В конце концов, собака поймет, что сидение, когда ей велят, приведет к угощению.Это лакомство усиливает поведение собаки, потому что оно нравится собаке, и она заставляет ее сидеть, когда ей приказывают. Есть четыре типа подкрепления: положительное, отрицательное, наказание и искоренение.
- Положительное подкрепление предполагает, что что-то добавляет, чтобы увеличить отклик . Например, добавление угощения увеличит реакцию сидения; добавление похвалы увеличит шансы вашего ребенка убрать свою комнату. Наиболее распространенные типы положительного подкрепления — это похвала и награда, и большинство из нас испытали это как дающий, так и получающий.
- Отрицательное подкрепление предполагает, что убирает что-то отрицательное, чтобы увеличить реакцию . Представьте себе подростка, которого родители заставляют вывозить мусор неделю за неделей. После того, как он пожаловался своим друзьям на ворчание, он, наконец, однажды выполняет задание, и, к его удивлению, ворчание прекращается. Устранение этого негативного стимула усиливает и, вероятно, увеличит шансы, что он вынесет мусор на следующей неделе.
- Наказание относится к , добавляющему что-то отталкивающее, чтобы уменьшить поведение .Самый распространенный пример этого — наказание (например, шлепание) ребенка за плохое поведение. Ребенок начинает ассоциировать наказание с негативным поведением. Ребенку не нравится наказание, и поэтому, чтобы избежать его, он перестанет вести себя подобным образом.
- Extinction включает в себя удаление чего-либо, чтобы уменьшить поведение. Когда что-то забирают, отклик уменьшается.
Исследования показали, что положительное подкрепление является самым мощным из этих типов оперантных обусловливающих реакций.Добавление положительного для усиления реакции не только работает лучше, но и позволяет обеим сторонам сосредоточиться на положительных аспектах ситуации. Наказание, применяемое сразу после негативного поведения, может быть эффективным, но приводит к исчезновению, если оно не применяется последовательно. Наказание также может вызывать другие негативные реакции, такие как гнев и негодование.
Работа Торндайка (1898) с кошками и коробками-пазлами иллюстрирует концепцию кондиционирования. Коробки с пазлами были примерно 50 см в длину, 38 см в ширину и 30 см в высоту (Рисунок 2.13). Ящики-головоломки Торндайка были сконструированы таким образом, что кошка, помещенная в ящик, могла сбежать, только если нажала на перекладину или потянула за рычаг, в результате чего веревка, прикрепленная к двери, подняла вес и открыла дверь. Торндайк измерил время, которое потребовалось кошке, чтобы выполнить требуемый ответ (например, потянуть за рычаг). Узнав реакцию, он дал кошке награду, обычно еду.
Рис. 2.13. Коробка-головоломка Торндайка.Торндайк обнаружил, что если кошка случайно наступила на выключатель, то при каждом последующем испытании внутри коробки с головоломкой она нажимала на него быстрее.Наблюдая и записывая, сколько времени потребовалось различным животным, чтобы спастись через несколько испытаний, Торндайк смог изобразить кривую обучения (в виде S-образной формы). Он заметил, что большинству животных сначала было трудно убежать, затем они начали убегать все быстрее и быстрее с каждым последующим испытанием коробки-головоломки, и в конечном итоге время побега выровнялось. Кривая обучения также предполагала, что разные виды обучаются одинаково, но с разной скоростью. Его открытие заключалось в том, что, например, кошки постоянно обучались постепенно.
На основе своих исследований с коробками-головоломками Торндайк смог создать свою собственную теорию обучения (1932):
- Обучение идет постепенно.
- Обучение происходит автоматически.
- Все животные учатся одинаково.
- Закон действия. Если за ассоциацией следует удовлетворение, она усиливается, а если за ней следует раздражение, она ослабляется .
- Право использования. Чем чаще используется ассоциация, тем сильнее она становится .
- Закон о неиспользовании. Чем дольше ассоциация не используется, тем слабее она становится .
- Закон новизны. Самый последний ответ, скорее всего, будет повторяться .
- Множественный ответ. Животное будет пробовать несколько ответов (методом проб и ошибок), если первый ответ не приводит к определенному положению вещей.
- Установка или отношение . Животные предрасположены к определенным действиям.
- Преимущество элементов. Субъект может отфильтровать нерелевантные аспекты проблемы и сосредоточиться на важных элементах проблемы и отреагировать на них. .
- Ответ по аналогии . Ответы из связанного или подобного контекста могут использоваться в новом контексте .
- Теория переноса идентичных элементов . Чем более похожи ситуации, тем больший объем информации будет передан .Точно так же, если ситуации не имеют ничего общего, информация, полученная в одной ситуации, не будет иметь никакой ценности в другой ситуации.
- Ассоциативное смещение . Можно сместить любую реакцию с одного стимула на другой. . Ассоциативный сдвиг утверждает, что сначала происходит реакция на ситуацию A, затем на AB, а затем, наконец, на B, таким образом смещая реакцию от одного состояния к другому, связывая его с этим условием.
- Закон готовности . Качество ответов и связей, которое приводит к готовности действовать . На поведение и обучение влияет готовность или неготовность ответов, а также их сила.
- Идентифицируемость. Идентификация или размещение ситуации — это первая реакция нервной системы, которая может распознать ее . Затем могут быть установлены соединения друг с другом или с другим ответом, и эти соединения зависят от исходной идентификации.Таким образом, большая часть обучения состоит из изменений в идентифицируемости ситуаций.
- Наличие . Простота получения конкретного ответа . Например, человеку было бы легче научиться прикасаться к своему носу или рту с закрытыми глазами, чем рисовать линию длиной пять дюймов с закрытыми глазами.
Джон Б. Уотсон способствовал изменению психологии в своем выступлении «Психология как бихевиористские взгляды на это» (1913), сделанном в Колумбийском университете.Благодаря своему бихевиористскому подходу Уотсон проводил исследования поведения животных, воспитания детей и рекламы, а также получил известность благодаря скандальному эксперименту «Маленький Альберт». Этот эксперимент, увековеченный в вводных учебниках психологии, призван показать, как недавно открытые принципы классической обусловленности могут быть применены для условного воспитания страха перед белой крысой у Маленького Альберта, 11-месячного мальчика. Уотсон и Рейнер (1920) впервые представили мальчику белую крысу и заметили, что мальчик не боится.Затем они подарили ему белую крысу и лязгнули железным прутом. Маленький Альберт ответил слезами. Эта вторая презентация повторялась несколько раз. Наконец, Ватсон и Райнер представили белую крысу отдельно, и мальчик испугался. Позже, пытаясь увидеть, перешел ли страх на другие объекты, Ватсон подарил Маленькому Альберту кролика, собаку и шубу. Он плакал при виде их всех. Это исследование продемонстрировало, как эмоции могут стать условными реакциями.
Burrhus Фредерик Скиннер назвал свою особую разновидность бихевиоризма радикальным бихевиоризмом (1974). Радикальный бихевиоризм — это философия науки о поведении . Он пытается понять поведение как функцию усиливающих последствий окружающей среды. Этот прикладной бихевиоризм не принимает частные события, такие как мышление, восприятие и ненаблюдаемые эмоции, в причинном объяснении поведения организма.
Во время исследования в Гарварде Скиннер изобрел оперантную камеру кондиционирования , широко известную как Скиннер-бокс (рис.14), используется для измерения ответов организмов (чаще всего крыс и голубей) и их упорядоченного взаимодействия с окружающей средой . В ящике был рычаг и поднос с едой, и голодная крыса внутри ящика могла доставить еду на поднос, нажав на рычаг. Скиннер заметил, что когда крыса впервые помещалась в ящик, она бродила вокруг, обнюхивая и исследуя, и обычно случайно нажимала на планку, после чего в лоток падала пеллетка с едой. После того, как это произошло, скорость нажатия на планку резко увеличилась и оставалась высокой до тех пор, пока крыса не переставала голодать.
Рисунок 2.14 Коробка Скиннера.Отрицательное подкрепление было также продемонстрировано Скиннером, помещавшим крыс в электрифицированную камеру, которая вызывала неприятные удары током. Внутри этих ящиков располагались рычаги отключения электроэнергии. Пропуская ток через коробку, Скиннер заметил, что крысы, после случайного нажатия на рычаг в безумной попытке убежать, быстро узнали действие рычага и, следовательно, использовали это знание, чтобы остановить ток как во время, так и до удара электрическим током.Эти два выученных ответа известны как обучение избеганию и обучение избеганию (Скиннер, 1938). Операционная камера для голубей представляла собой пластиковый диск, в который голубь клевал, чтобы открыть ящик, заполненный зерном. Коробка Скиннера привела к принципу подкрепления, который представляет собой вероятность того, что что-то произойдет, на основе последствий поведения.
Research Focus
Применение игровых стимулов, таких как подсказки, соревнования, значки и награды, к обычным действиям, или геймификация, — это растущий подход к изменению поведения сегодня.Здравоохранение также применяет некоторые ранние инновационные применения геймификации — от контроллера движений Sony PS3 Move, который используется для помощи детям с диагнозом рака, до запуска Games for Health , первого рецензируемого журнала, посвященного исследованиям и проектированию здоровья. игры и стратегии поведенческого здоровья. Геймификация — это процесс принятия обычного действия (например, бега трусцой или каршеринга) и добавления к нему игровых механизмов, включая подсказки, награды, таблицы лидеров и соревнование между разными игроками.
При использовании в социальном маркетинге и онлайн-кампаниях по продвижению здоровья геймификация может использоваться для поощрения нового, здорового поведения, такого как регулярные физические упражнения, улучшение диеты или выполнение действий, необходимых для лечения. Как правило, геймификация осуществляется через Интернет, как правило, с помощью мобильного приложения или микро-сайта. Кампании по изменению поведения требуют понимания психологии человека, в частности, преимуществ и препятствий, связанных с определенным поведением. Было проведено несколько кампаний с использованием методов геймификации, которые дали замечательные результаты.Например, организации, которые хотели, чтобы сотрудники регулярно тренировались, установили тренажерные залы в своих офисах и создали специальное приложение, которое награждает сотрудников за «проверку» в тренажерных залах. Сотрудники могут формировать региональные команды, проверять тренировки и отслеживать прогресс своей команды в таблице лидеров. Это оказывает сильное влияние на создание и поддержание положительного изменения поведения.
Аналогичная игровая механика использовалась в кампаниях по обеспечению устойчивости, направленных на повышение соответствия требованиям окружающей среды в домашних условиях.Такие сайты используют игровую механику, такую как очки, испытания и награды, для выработки ежедневных «зеленых» привычек, таких как переработка и экономия воды. Другие кампании по изменению поведения, в которых применялись социальные игры, включают использование камер для записи скорости автомобилей, что снижает частоту превышения скорости, и предложение продуктов, позволяющих пользователям отслеживать свое здоровое поведение в течение дня, включая пройденные мили, сожженные калории и подъем по лестнице.
Основные выводы
- Бихевиористская психология должна заниматься наблюдаемым поведением людей и животных, а не ненаблюдаемыми событиями, которые происходят в их сознании.
- Наибольшее влияние на бихевиористскую психологию оказали Иван Павлов (1849-1936), Эдвард Ли Торндайк (1874-1949), Джон Б. Уотсон (1878-1958) и Б.Ф. Скиннер (1904-1990).
- Идея о том, что мы развиваем ответы на определенные стимулы, которые не возникают в природе, называется «классическим обусловливанием».
- Оперантное кондиционирование относится к тому, как организм воздействует на окружающую среду или как он реагирует на то, что ему преподносят в окружающей среде.
- Подкрепление означает усиление и используется в психологии для обозначения любого стимула, который усиливает или увеличивает вероятность определенной реакции.
- Есть четыре типа подкрепления: положительное, отрицательное, наказание и искоренение.
- Исследователи-бихевиористы использовали экспериментальные методы (ящик-головоломка, оперантное кондиционирование или ящик Скиннера, эксперимент Маленького Альберта) для исследования процессов обучения.
- Сегодня бихевиоризм по-прежнему широко используется в таких приложениях, как геймификация.
Упражнения и критическое мышление
- Обдумайте свой образовательный опыт и попытайтесь определить, какие аспекты бихевиоризма использовались.
- Изучите другие изобретения Скиннера, такие как «обучающая машина» или «детская кроватка», и обсудите с группой основные принципы, верования и ценности, которыми руководствуются такие «машины». Вы не согласны или согласны с их использованием?
- Какие еще могут быть приложения для стратегий изменения поведения геймификации? Разработайте кампанию или стратегию для изменения поведения по вашему выбору (например, в отношении здоровья, работы, зависимости или устойчивой практики).
Атрибуция изображений
Рисунок 2.12: Диаграмма кондиционирования оперантов, разработанная studentne (http://commons.wikimedia.org/wiki/File:Operant_conditioning_diagram.png), используемая по лицензии CC BY SA 3.0 (http://creativecommons.org/licenses/by-sa/3.0 /deed.en).
Рисунок 2.13: Головоломка Торндайка. Джейкоба Сассмана (http://commons.wikimedia.org/wiki/File:Puzzle_box.jpg) находится в открытом доступе.
Рисунок 2.14 : Схема коробки Скиннера 01, автор Andreas1 (http://commons.wikimedia.org/wiki/File:Skinner_box_scheme_01.png) используется по лицензии CC BY SA 3.0 (http://creativecommons.org/licenses/by-sa/3.0/deed.en).
Список литературы
Скиннер, Б.Ф. (1938). Поведение организмов: экспериментальный анализ . Оксфорд, Англия: Appleton-Century.
Скиннер, Б.Ф. (1974). О бихевиоризме . Нью-Йорк, штат Нью-Йорк: Random House.
Торндайк, Эдвард Ли. (1898). Разведка животных . Принстон, Нью-Джерси: Макмиллан.
Торндайк, Эдвард (1932). Основы обучения .Нью-Йорк, Нью-Йорк: AMS Press Inc.
Уотсон, Дж. Б. (1913). Психология с точки зрения бихевиориста. Психологический обзор , 20 , 158-177.
Уотсон, Дж. Б., и Рейнер, Р. (1920). Условные эмоциональные реакции. Журнал экспериментальной психологии , 3 , 1-14.
Полностью магнитно-левитирующая вспомогательная система левого желудочка для лечения расширенной сердечной недостаточности: многоцентровое исследование
https://doi.org/10.1016/j.jacc.2015.09.083Получить права и содержание Система (LVAS) предназначена для долгосрочной поддержки пациентов с тяжелой сердечной недостаточностью.Насос с центробежным потоком разработан для повышения гемосовместимости за счет включения ротора, поднимаемого на магнитной подушке, с широкими путями кровотока и искусственного импульса.Цели
Целью этого проспективного многоцентрового исследования с одной группой было оценить эффективность и безопасность LVAS.
Методы
Первичной конечной точкой была 6-месячная выживаемость по сравнению с целевым показателем, установленным INTERMACS (Межведомственный регистр механической поддержки кровообращения).Пациенты были взрослыми с фракцией выброса ≤25%, сердечным индексом ≤2,2 л / мин / м 2 без инотропов, либо были инотропно-зависимыми при оптимальном медицинском лечении, либо были внесены в список для трансплантации.
Результаты
В 10 центрах было включено 50 пациентов. Показаниями для поддержки LVAS были мост к трансплантации (54%) или целевое лечение (46%). Через 6 месяцев 88% пациентов продолжили лечение, 4% получили трансплантаты и 8% умерли. Тридцатидневная смертность составила 2%, а 6-месячная выживаемость — 92%, что превысило целевой показатель эффективности 88%.Поддержка с помощью полностью левитируемого магнитным полем LVAS значительно снизила риск смерти на 66% по сравнению с прогнозируемой выживаемостью в модели Сиэтлской сердечной недостаточности на 78% (p = 0,0093). Ключевые побочные эффекты включали повторную операцию по поводу кровотечения (14%), инфекции трансмиссии (10%), желудочно-кишечного кровотечения (8%) и изнурительного инсульта (модифицированная оценка Рэнкина> 3) (8%). Не было замен помпы, неисправностей помпы, тромбоза помпы или событий гемолиза. Классификация Нью-Йоркской кардиологической ассоциации, тест на 6-минутную ходьбу и показатели качества жизни показали постепенное и устойчивое улучшение.
Выводы
Результаты показывают, что хронический LVAS с центробежным потоком, полностью левитируемый магнитным полем, является безопасным, с высокой 30-дневной и 6-месячной выживаемостью, благоприятным профилем побочных эффектов и улучшенным качеством жизни и функциональным статусом. (План клинических исследований HeartMate 3 ™ CE Mark [HM3 CE Mark]; NCT02170363)
Ключевые слова
HeartMate 3
гемолиз
помпа
качество жизни
тромбоз
0 Аббревиатуры levitated INTERMACSМежведомственный реестр для поддержки кровообращения с механической поддержкой
INRмеждународное нормализованное соотношение
LVлевый желудочек / желудочек
LVASвспомогательная система левого желудочка
NYHANew York Heart Association
SHFMСиэтлская сердечная недостаточность 9000 статей Рекомендуемые статьи
(0)
© 2015 Фонд Американского колледжа кардиологов.Опубликовано Elsevier.
Рекомендуемые статьи
Ссылки на статьи
Frontiers | Явления взаимодействия, которые необходимо учитывать при контроле антропогенной вибрации легких конструкций
Введение
Инерционные регуляторы вибрациишироко используются для подавления вибраций, вызванных деятельностью человека. Примеры можно найти в пешеходных мостах, длиннопролетных полах, на трибунах и т. Д. Большинство применений основано на так называемом настроенном амортизаторе вибрации (TVA) (также известном как настроенный демпфер массы) (Elias and Matsagar, 2017), который инерционный регулятор вибрации, работающий пассивно.TVA настроен на определенный режим вибрации, поэтому проблемы с расстройкой возникают, когда свойства модели конструкции меняются с течением времени или устройство изменяет свои свойства. Следовательно, для их устранения применялись такие подходы, как мульти-TVA (Caetano et al., 2010; Van Nimmen et al., 2016) и полуактивная TVA (Soria et al., 2017; Moutinho et al., 2018). вопросы.
Проблема рассогласования становится еще более серьезной при управлении вибрацией очень легких пешеходных конструкций.В отличие от традиционных пешеходных мостов, в которых для анализа пригодности к эксплуатации при вибрации учитываются резонансные отклики до 5 Гц, очень легкие конструкции могут показывать заметные нерезонансные отклики даже до 10 Гц (Russell et al., 2019). Кроме того, массой пассажиров нельзя пренебречь по сравнению с модальной массой конструкции, и, следовательно, активные люди не могут быть смоделированы как простая статическая нагрузка, поскольку возникают явления взаимодействия между людьми и конструкцией.Следовательно, при проектировании TVA следует учитывать отклики от структурных резонансов и взаимодействия человека и конструкции (HSI).
Активная версия TVA, известная как Active Vibration Absorber (AVA), также была успешно внедрена в лабораторных и эксплуатационных сооружениях, чтобы справляться с чрезмерными вибрациями, вызванными деятельностью человека. Система AVA в основном включает: (i) привод (ы), который передает контролируемые силы на целевую конструкцию, чтобы минимизировать ее колебания, (ii) систему управления, которая в реальном времени вычисляет командный сигнал (напряжение) для исполнительный механизм, чтобы развивались целевые силы, и (iii) датчики, расположенные на конструкции, которые предоставляют кинематическую информацию (обычно ускорение), необходимую для контроллера для расчета командного сигнала.Несколько морфологий приводов использовались для активного контроля вибрации, некоторыми примерами являются приводы с электромагнитной испытательной массой (Casado et al., 2013; Zhang and Ou, 2015; Mao and Huang, 2019), пневматические приводы мышц (Bleicher et al., 2011) и несколько приводов с вращающейся массой (Terrill et al., 2020), среди других.
Самой сложной частью проектирования в системе AVA является алгоритм управления. Самый распространенный метод — это управление с прямой обратной связью по скорости, при котором скорость конструкции оценивается путем интегрирования сигнала акселерометра.Если рассматривать идеальный привод и датчик, замкнутая система безусловно устойчива (не зависит от усиления управления). Тем не менее, это предположение справедливо только в том случае, если резонансная частота исполнительного механизма намного ниже, чем целевые частоты конструкции. Когда рассматривается реальный актуатор, его динамика вмешивается в общую динамику системы, уступая место условно устойчивой системе. В этом случае корневой годограф замкнутой системы показывает пару ветвей, которые входят в правую полуплоскость после определенного значения усиления управления.Было предложено несколько подходов для увеличения запаса устойчивости систем AVA, таких как: модифицированная обратная связь при ускорении (Díaz and Reynolds, 2009), внутренний резонансный контроль (Díaz et al., 2012b), подход внутреннего контура управления (Díaz et al. ., 2012a), или технику Virtual Mass (Mao et al., 2020).
Обычно считается, что динамика привода не зависит от реакции конструкции. Однако эта гипотеза верна только в том случае, если смещения конструкции незначительны по сравнению с смещениями инерционной массы привода.Следовательно, сила, передаваемая приводом, зависит только от командного сигнала и собственной динамики. Этот сценарий моделируется с помощью хорошо известной модели исполнительного механизма с пробной массой второго порядка (Preumont, 2002) или модели трех порядков (Díaz and Reynolds, 2009), когда электрическая подсистема играет значительную роль в передаточной функции исполнительного механизма. (TF). Тем не менее, при работе с легкими гибкими конструкциями движение конструкции может существенно повлиять на движение инерционной массы исполнительного механизма, и феноменом взаимодействия исполнительного механизма и конструкции (ASI) больше нельзя пренебрегать.
Что касается антропогенных нагрузок, экспериментальных кампаний с использованием силовых пластин (Parkhouse and Ewins, 2006), датчиков (Moreu et al., 2020), стелек для обуви (Wang H. et al., 2019) или подходов компьютерного зрения (Wang Y . et al., 2019), если упомянуть некоторые из них, были выполнены, чтобы точно охарактеризовать эти действия. Таким образом, детерминированные (Boniface et al., 2006; Heinemeyer et al., 2009) или стохастические (Casciati et al., 2017; Ramos-Moreno et al., 2020) модели предлагались на протяжении многих лет для прогнозирования динамической реакции конструкции под действия человека.Кодексы и подходы к проектированию управления учитывают, что силы, создаваемые деятельностью человека, одинаковы для гибкой и жесткой конструкции. Однако это предположение может не выполняться даже для умеренно легких конструкций, таких как трибуны или пешеходные мосты, поскольку реакция может быть плохо оценена (Ahmadi et al., 2019). В этих случаях люди будут реагировать на поведение гибкой конструкции, когда они воспринимают вибрацию, изменяя свою походку, и возникает так называемый феномен HSI.
Хотя действия пешеходов моделировались точечными периодическими силами (ISO, 2012; CEN, 2020), хорошо известно, что динамические свойства человеческого тела влияют на работоспособность конструкции при вибрации (Van Nimmen et al., 2017). Поскольку структурная реакция может быть снижена при рассмотрении динамики человека, в литературе были предложены модели с одной степенью свободы (SDOF) (биодинамические) для различных типов человеческих действий (Jones et al., 2011; Shahabpoor et al. ., 2016; Сильва и др., 2020). В общем, считается, что взаимодействие происходит только при больших смещениях, на гораздо более высоких уровнях, чем те, которые предписаны в кодексах. С другой стороны, когда инерционное управление начинает гасить вибрацию, этот уровень обычно высок, и управляемая система может быть значительно изменена под влиянием человека (система взаимосвязанных структур человека). Следовательно, при разработке стратегий управления вибрацией для обеспечения работоспособности при вибрации, HSI играет важную роль, и ее нельзя игнорировать.
В этой статье ставится общая проблема контроля вибрации при проектировании инерционных контроллеров при работе с очень легкими гибкими пешеходными конструкциями. В статье собраны явления взаимодействия, которые необходимо учитывать для контроля вибрации этих конструкций. Таким образом, во-первых, выводится TF с обратной связью для структуры с HSI, а во-вторых, получается TF с обратной связью для TVA и AVA (без и с ASI). Следовательно, показано, как взаимодействия влияют как на TF с разомкнутым, так и с замкнутым контуром, и, следовательно, на конструкцию контроллера в частотной области.
Что касается AVA, здесь предполагается совмещенное и немодельное управление, то есть вибрация измеряется и нейтрализуется в одной и той же физической точке, и никакая модель не используется в реализации закона управления, соответственно. Было продемонстрировано, что стратегии управления, основанные на совмещенных исполнительных механизмах и датчиках, обеспечивают большую надежность, стабильность, производительность и простоту реализации по сравнению с полной системой управления с обратной связью в пространстве состояний и подходами на основе моделей. Таким образом, принята динамическая совмещенная модель структуры человека, основанная на довольно простой и адаптированной к практике модели масса-пружина-демпфер-привод, основанная на Dougill et al.(2006).
После этого введения общие уравнения движения и TF общей схемы управления описаны в разделе «Системное моделирование». В разделе «Практический пример: пешеходный мост из стеклопластика» представлен практический пример лабораторного пешеходного моста из очень легкого армированного волокном полимера (FRP). Этот объект (без HSI и с ним) анализируется при детерминированных и стохастических предположениях, а результаты модели с обратной связью сравниваются с результатами модели FE. В разделе «Проектирование контроллеров» представлено проектирование систем TVA и AVA для исследуемой установки.Для систем AVA изучаются стабильность и динамические свойства в следующих сценариях, что дает направления для проектирования контроллера: (i) случай идеального привода, (ii) случай реального привода, (iii) случай реального привода с ASI, (iv) реальный случай привода. корпус привода с ASI и HSI. В разделе «Обсуждение» обсуждается значение HSI с учетом другого легкого пешеходного моста из FRP с более низкой основной собственной частотой и с использованием предложенной методологии. В оставшейся части документа, в разделе «Заключение и перспективы на будущее», делаются выводы и некоторые будущие работы.
Системное моделирование
В этом разделе описаны модели объекта управления, человека и инерционные контроллеры, задействованные в схеме управления.
Модель завода
Модель SDOF для завода изображена на рисунке 1A, и ее уравнение движения равно
.Рис. 1. Модели систем: (A) Диаграмма рабочего тела в свободном состоянии, (B) Блок-схема завода , диаграмма свободного тела (C) HSI и блок-схема (D) HSI.
msxs..s + csx.s + ksxs = Fh, (1)
, где x s = x s ( t ) (м) — смещение конструкции в контрольной точке (над точками указаны производные по времени), ks = ωs2 мс (Н / м) — жесткость конструкции, ω s = 2π f s (рад / с) — круговая собственная частота конструкции, c s = 2ω с м с ζ с (Нс / м) — вязкое демпфирование конструкции, а F h (Н) — сила возбуждения. по структуре.
Принимая преобразование Лапласа уравнения. 1 и учитывая вклад нескольких режимов вибрации, TF между реакцией на ускорение и силой в контрольной точке составляет
GS (s) = s2Xs (s) Fh (s) = ∑i = 1Ns1 / msi⋅s2s2 + 2ωsiζsis + ωsi2, (2)
с i = 1, 2,… N s , где N s — количество рассматриваемых мод структуры, s — переменная Лапласа, F h ( s ) — это преобразование Лапласа внешней человеческой силы, действующей на структуру, а s 2 X s ( s ) — преобразование Лапласа структурное ускорение, равное X s ( s ) преобразование Лапласа структурного смещения.На рисунке 1B показана блок-схема установки.
Интерактивная модель человека
Система масса-пружина-демпфер-привод, основанная на динамических свойствах человеческого тела и прикрепленная к конструкции, используется для учета явления HSI. Таким образом, человек определяется его массой ( m h ), собственной частотой ( f h ) и коэффициентом демпфирования (ζ h ). Кроме того, гармоническая сила, создаваемая ногами человека, рассматривается как пара сил действия-противодействия, действующих одновременно как на конструкцию, так и на человека, здесь называется движущей силой человека и обозначается F a (Н) .
При рассмотрении HSI динамический анализ связанной системы «человек-структура» выполняется с предположением, что взаимодействие может быть смоделировано как замкнутая система, в которой действия человека передаются обратно в структуру. Учитывая, что один человек действует на конструкцию, этот контур обратной связи легко вывести из баланса сил, показанного на рисунке 1C для модели SDOF для конструкции, который определяется следующими выражениями
mhxh..h + kh (xh-xs) + ch (x.h-x.s) = Fa, (3)
-mhxh..h = (Fhsi-Fa), (4)
msxs..s + csxs + ksxs = (Fhsi-Fa), (5)
, где x h (м) — перемещение человека, kh = ωh3mh (Н / м) — жесткость модели человека, ω h = 2π f h (рад / с) — круговая собственная частота человека, c h = 2ω h m h ζ h (нс / м) вязкое демпфирование человека, а F hsi (Н) — пассивная сила, передаваемая между конструкцией и человеком.
Из преобразования Лапласа Ур. 3–5, структурная схема системы связанных структур человека построена, как показано на рисунке 1D. Эта диаграмма использует структурный TF (см. Уравнение 2) и два дополнительных TF, которые учитывают: (i) силу, создаваемую людьми без движения конструкции G H ( s ) и (ii) силу Сила взаимодействия человека G H S I ( s ). Таким образом, для N h числа людей, действующих в контрольной точке, эти два TF определяются следующим образом:
GH (s) = Fha (s) Fa (s) = ∑j = 1Nh-s2s2 + 2ωhjζhjs + ωhj2, (6)
GHSI (s) = Fhsi (s) s2Xs (s) = ∑j = 1Nhmhj (2ωhjζhjs + ωhj2 ) s2 + 2ωhjζhjs + ωhj2, (7)
с j = 1, 2,… N h , где F га — сила, создаваемая людьми, без учета силы, передаваемой им из-за движения конструкции.Тогда TF связанной системы человек-структура выглядит следующим образом:
GH (s) = GS⋅Gh2 + GS⋅GHSI. (8)
Настроенный амортизатор
Модель, связанная с TVA-структурой, сначала разрабатывается с учетом модели SDOF для конструкции. Управляющая сила, входящая в конструктивную систему, получается из передаваемой силы ( F t ) TVA. На рисунке 2A показана система конструкции, которая включает TVA, которая регулируется этими уравнениями движения
.mtxt + ct (x.t-x.s) + kt (xt-xs) = 0, (9)
-mtxt = Ft, (10)
msxs + csxs + ksxs-ct (x.t-x.s) + kt (xt-xs) = Fha, (11)
Рисунок 2. TVA-система: (A) Схема свободного тела, (B) Блок-схема установки с TVA и (C) Блок-схема установки с TVA и HSI.
, где x t (м) — смещение TVA, kt = ωt2mt (Н / м) — жесткость пассивного инерционного регулятора, ω t = 2π f t (рад / с) — его круговая собственная частота, f t (Гц) — соответствующая собственная частота, м t (кг) — масса устройства, c t = 2ω t m t ζ t (Нс / м) — вязкое демпфирование устройства, а ζ t Коэффициент демпфирования TVA.
Из ур. 9–11, TF между F t и ускорением конструкции будет следующим
GT (s) = Ft (s) s2Xs (s) = mt (2ωtζts + ωt2) s2 + 2ωts + ωt2. (12)
Для системы, исключающей явление взаимодействия, пассивный контроллер, подключенный к установке, определяется схемой с обратной связью ( G C L , T ), представленной ниже
GCL, T (s) = GS1 + GS⋅GT, (13)
, где G S показано в уравнении.2 и G T представлен в формуле. 12. Блок-схема системы, представленной формулой. 13 изображено на Фигуре 2В. С другой стороны, схема с обратной связью ( G H C L , T ), которая представляет систему TVA с заводом с учетом HSI, составляет
GHCL, T (s) = GS⋅Gh2 + GS⋅ (GHSI + GT), (14)
, в котором используемые TF определены в уравнениях. 2, 6, 7 и 12. Блок-схема этой системы показана на рисунке 2C.
Активный амортизатор
Далее выводятся TF для системы AVA. Уравнения движения, предполагающие модель SDOF для конструкции (см. Рисунок 3A), равны
.Рисунок 3. Система AVA: (A) Схема свободного тела, (B) Блок-схема установки с AVA и (C) Блок-схема установки с AVA и HSI.
msxs = -ksxs-csx.s + ka (xa-xs) + ca (x.a-x.s) -Fe + Fha, (15)
для конструкции и
maxa = -ka (xa-xs) -ca (x.a-x.s) + Fe, (16)
для привода с испытательной массой, в котором x a (м) — это смещения инерционной массы привода, а F e (Н) — (электромагнитная) сила, создаваемая привод. Кроме того, м a (кг) — это подрессоренная / подвижная масса привода, а k a (Н / м) и c a (Нс / м) — соответственно его жесткость и вязкое демпфирование.
Сила, передаваемая на конструкцию от привода, может быть выражена как
.Ft = -maxa..a = ka (xa-xs) + ca (x.a-x.s) + Fe, (17)
Принимая преобразование Лапласа уравнения. 16, умножив обе стороны на м a s 2 и учитывая уравнение. 17 урожаев
Ft (s) = — mas2Xa (s) = — mas2mas2 + cas + kaFe (s)
-ma (cas + ka) mas2 + cas + kas2Xs (s), (18)
, который представляет TF с несколькими входами и одним выходом между силой, передаваемой на конструкцию исполнительным механизмом, и электромагнитной силой F_e и ускорением конструкции x¨s.Последний представляет собой ASI.
Использование отношения F e ( t ) = K e ⋅ V ( t ), которое связывает электромагнитную силу, развиваемую приводом и его элементом управления Напряжение, TF между силой, передаваемой приводом испытательной массы, и его входным напряжением, в случае абсолютно жесткой конструкции, может быть выражено следующим образом
GA (s) = Kes2s2 + 2ωaζas + ωa2, (19)
, в котором K e > 0 (Н / В) — это силовая постоянная привода с испытательной массой, ω a = 2π f a (рад / с) — круговая собственная частота, f_a (Гц) — соответствующая собственная частота, а ζ a — коэффициент демпфирования устройства.Стоит отметить, что был получен ТФ второго порядка, поскольку электромеханическая связь скоростей не учитывалась. Это эквивалентно рассмотрению идеального усилителя крутизны (Preumont, 2002).
TF, учитывающий силу, передаваемую конструкции из-за ее взаимодействия с приводом испытательной массы (второй член правой части уравнения 18), можно представить как
GAI (s) = cas + kas2 + 2ωaζas + ωa2. (20)
Выбранная стратегия управления — DVFC, таким образом, входное напряжение на исполнительный механизм определяется с помощью контроллера, выход которого пропорционален расчетной скорости конструкции.TF этого контроллера был идеализирован для ясности как чистый интегратор, на который влияет коэффициент усиления K v следующим образом
C (s) = Kvs. (21)
Более реалистичные подходы используют полосовой фильтр для оценки скорости по ускорению конструкции (Díaz and Reynolds, 2009). Блок-схемы результирующих структурных систем без учета HSI и ранее объясненных TF показаны на рисунках 3B, C соответственно.TF с обратной связью всей системы без HSI, G CL , выражается следующим образом:
GCL (s) = GS1 + GS⋅ (C⋅GA + GAI), (22)
и, наконец, TF с обратной связью с HSI, G H C L , составляет
GHCL (s) = GS⋅Gh2 + GS⋅ (C⋅GA + GAI + GHSI). (23)
Пример использования: пешеходный мост FRP
В этом разделе изучается легкий пешеходный мост из FRP вместе с неопределенностями в его динамических свойствах (эквивалентная модальная масса, собственная частота и коэффициент демпфирования).Также представлен дизайн контроллеров.
Описание конструкции
Пешеходный мост представляет собой свободно поддерживаемую конструкцию из стеклопластика длиной 10 м и шириной 1,5 м. На рис. 4A показан вид сверху пешеходного моста, который состоит из профилей из пултрузионного стеклопластика (GFRP) и полос из углеродного стеклопластика (CFRP), производимых Fiberline Composites A / S. (2018). Основными элементами являются три профиля GFRP, один I 300 × 150 × 15 и два U 300 × 90 × 15, разделенных поперечно на 0,75 м. Также ленты из углепластика (E 139/90/4.9 и E 139/150 / 4.9) прикреплены к верхнему и нижнему фланцам стрингеров по всей их длине, как показано на рисунке 4B. Элементы GFRP I 160 × 80 × 8, расположенные на расстоянии 1,25 м от шарнирных опор и каждые 1,20 м по остальной длине моста, представляют собой поперечные балки, действующие как боковые ограничители.
Рис. 4. Пешеходный мост из стеклопластика : (A) вид сверху и (B) поперечное сечение.
HD-панели из стеклопластика образуют настил моста, а слой дорожного покрытия из переработанной резины считается изнашиваемой поверхностью.Тросы из нержавеющей стали, пересекающие профили GFRP SHS 60 × 60 × 5, образуют поручни, а полые квадратные секции соединяются со стороной каждого U-образного профиля на каждом пересечении между стрингером и поперечной балкой. В области опоры заливается бетон с прочностью на сжатие 30 МПа (см. Рис. 4A), чтобы облегчить конструкцию шарнирных и роликовых опор. Таким образом, бетонные блоки на концах моста имеют размер 1,5 м на 0,3 м на 0,3 м. Для сборки конструкции используются профили GFRP L 75 × 75 × 8 и болты из нержавеющей стали.
Модель конечных элементов
С учетом вышеупомянутой информации в Abaqus разработана линейная упругая КЭ-модель конструкции (SIMULIA, 2017). На рис. 5A показана модель, в которой используются элементы оболочки (S4R) для представления стрингеров, перекладин, опор поручней и панелей настила. В то время как твердые элементы (C3D8R) используются для моделирования бетонных блоков на обоих концах пешеходного моста. Верхняя и нижняя полки стрингеров определяются как составные слои оболочки, состоящие из двух слоев.Первый слой относится к ламинату GFRP, а второй соответствует полосе CFRP.
Рисунок 5. Пешеходный мост : (A) модель FE, (B) Первый режим вибрации и (C) Второй режим вибрации.
Ограничения стяжек выбираются для соединения стрингеров, перекладин и опор поручней, и соединения между стрингерами и настилом определяются аналогично. Стрингеры соединяются с бетонными блоками с использованием техники встроенных элементов, поэтому твердотельные элементы являются базами для элементов оболочки.Свойства элементов FRP представлены в таблице 1, а механические свойства бетона приняты следующими: плотность ρ c = 2400 кг / м 3 , модуль Юнга E c = 28 ГПа , а коэффициент Пуассона ν c = 0,30.
Таблица 1. Характерные значения жесткости элементов FRP.
Для представления конструкции с простой опорой, смещения двух областей равны 0.20 м на 0,15 м внизу одного бетонного блока ограничены в продольном, поперечном и вертикальном (x, y и z) направлениях. При этом ограничиваются только вертикальное (y) и поперечное (z) смещения двух аналогичных областей в нижней части другого блока. Дополнительная масса 60 кг / м. 2 также определена над настилом моста, чтобы учесть все неструктурные компоненты, опущенные в модели.
Модель эквивалентной конструкцииНа основе раздела «Модель завода» строится модель завода.В общем, следует учитывать все режимы вибрации с собственными частотами ниже 10 Гц, которые могут быть вызваны действиями человека. Таким образом, для анализа выбран только первый вертикальный режим (см. Рисунки 5B, C). Модель SDOF выводится после проведения модального анализа с использованием модели FE. Получены эквивалентная модальная масса ( м s ) 837,9 кг и собственная частота ( f s ) 5,18 Гц. Для завершения необходимых данных для модели предполагается коэффициент демпфирования (ζ s ) равный 2% (Ascione et al., 2016; Wei et al., 2019).
Чтобы охарактеризовать влияние окружающей среды и физических условий на структуру FRP, статистические распределения используются для описания его динамических параметров. Во-первых, статистические свойства, относящиеся к эффективной модальной массе, получают путем проведения 1000 модального анализа с использованием модели FE (см. Рисунок 5A). Поскольку композитные элементы были изготовлены путем пултрузии, плотность стеклопластика и углепластика предполагается постоянной. Масса, не являющаяся частью конструкции, изменяется согласно нормальному распределению со средним значением 60 кг / м 2 и коэффициентом вариации (COV) 4% (JCSS, 2001).Полученное значение эквивалентной модальной массы составляет 837,9 кг, а COV составляет 2%.
Во-вторых, собственная частота и коэффициент демпфирования пешеходного моста, как предполагается, описываются двухпараметрическим распределением Вейбулла, учитывая, что жесткость и прочностные характеристики композитов обычно соответствуют этому типу распределения (Zureick et al., 2006). Среднее значение 5,18 Гц принято для распределения собственной частоты с COV 7%. Это соображение направлено на учет деградации конструкции с годами (Stratford, 2012), неопределенностей в жесткости структурных элементов, гибкости болтовых соединений и изменений массы, не являющейся частью конструкции.S вместе с величиной TF 20 стохастических систем для наглядности.
Рисунок 6. Системы с неопределенностями: (A) Блок-схема и величины TF 20 моделей завода, и (B) Блок-схема и величины TF 20 моделей с учетом HSI.
HSI Модель
МодельHSI моделируется для людей, подпрыгивающих в середине пешеходного моста из стеклопластика. Поскольку это наиболее чувствительная точка конструкции, здесь изучаются действия людей и инерциальных контроллеров (описанные в разделе «Проектирование контроллеров»).Подскакивание считается нагрузкой, вызванной человеком, потому что оно позволяет получить не зависящий от времени TF для связанной системы структуры человека. Кроме того, HSI может повлиять на динамическое поведение конструкции, поскольку опоры остаются в контакте с мостом в любое время. На основании данных Dougill et al. (2006) номинальные параметры человеческого тела, рассматриваемые в этом исследовании, составляют: 66 кг для массы, 2,3 Гц для собственной частоты и 25% для коэффициента демпфирования.
Подобно свойствам структуры, неопределенности в динамических параметрах человеческого тела могут рассматриваться из-за изменчивости значений, сообщаемых в литературе для подпрыгивающих людей (Jones et al., 2011). Таким образом, приняты следующие соображения: (i) масса человека соответствует нормальному распределению μ = 70 кг и COV = 5%, (ii) частота человеческого тела описывается равномерным распределением между 1,5 Гц и 6,0. Гц, и (iii) коэффициент демпфирования человека следует равномерному распределению между 20 и 50%.
Учитывая, что статистические распределения человеческого тела также взаимно независимы, с использованием метода LH генерируется 1000 многомерных стохастических выборок.HSI отображаются. Еще раз для наглядности на этом графике представлены только величины TF 20 стохастических систем.
Проверка модели HSI
Для проверки предложенной модели HSI результаты номинальной системы, связанной с человеком и структурой (см. Уравнения 2, 6–8), сравниваются с результатами модели FE. Изучаются подпрыгивание одного человека ( N_h2 ) и двух человек ( N h 2) на середине пешеходного моста. Для проведения динамического анализа в Abaqus (SIMULIA, 2017) используется метод прямого интегрирования HHT-α с постоянным шагом по времени, равным 0.001 с и модель демпфирования Рэлея 2%. На рисунках 7A, B показаны системы масса-пружина-демпфер, которые представляют каждое человеческое тело в модели FE для двух сценариев, когда люди подпрыгивают синхронно в середине пролета. Помимо систем масса-пружина-демпфер, используется гармоническая сила, которая представляет действие подпрыгивания. Это действие описывается следующим образом
Рисунок 7. Сравнение результатов: (A) Система демпфирования жесткости по массе для 1 человека, (B) Системы демпфирования жесткости по массе для 2 человек, (C) Хронология реакции на ускорение для 1 подпрыгивающего человека и (D) Временная история реакции ускорения для 2 подпрыгивающих людей.
Fha (t) = Wh (∑k = 1NharDLFk⋅sin (2πkft + ϕk)), (24)
с k = 1, 2,… N h a r , где N har — количество рассматриваемых гармоник, W h h — вес человека, DLF k — коэффициент динамической нагрузки для каждой рассматриваемой гармоники, f — частотная составляющая повторяющейся нагрузки, а ϕ k — фазовый угол k -я гармоника.В этом исследовании DLF составляют 0,582, 0,114 и 0,036 для первых трех гармоник, соответственно, связанных с отражением. Значения получены из генерируемых коэффициентов нагрузки (GLF), α 1 = 0,286, α 2 = 0,095 и α 3 = 0,033, предложенных Dougill et al. (2006), и TF, представленный в формуле. 6.
На рисунке 7C показано сравнение для случая подпрыгивания одного человека. Максимальное ускорение для модели FE составляет 1,44 м / с 2 , а полученный результат для модели GH равен 1.50 м / с 2 . На рисунке 7D представлены результаты для сценария с двумя синхронизированными шезлонгами, где пиковые характеристики составляют 2,14 м / с 2 (модель FE) и 2,23 м / с 2 (модель с обратной связью). На обоих графиках структурная реакция пешеходного моста аналогична при использовании численной модели (см. Раздел «Модель конечных элементов») и упрощенной модели (см. Уравнение 8). Поэтому предполагается, что предложенная методология будет проверена и будет использована в следующих разделах для разработки и обсуждения результатов с использованием пассивных и активных контроллеров.
Конструкция контроллеров
В этом разделе системы TVA и AVA разработаны для пешеходного моста FRP с использованием TF, представленных в разделах «Настроенный гаситель вибрации» и «Активный гаситель вибрации».
TVA Design
Расчет TVA выполняется с использованием процедуры одноцелевой оптимизации. H норма TF номинальной системы, без и с HSI, выбрана в качестве целевой функции, которая должна быть минимизирована с помощью метаэвристического метода.В этой работе одноцелевой генетический алгоритм (GA), который предоставляется набором инструментов MATLAB (Mathworks, 2019), используется для проектирования TVA в двух случаях.
Предполагается, что инерционная масса устройства составляет 30,4 кг для обоих сценариев. Это значение выбрано заранее, потому что AVA, изученная и описанная в разделе 3.7, имеет ту же инерционную массу. Для частоты и коэффициента затухания пассивного контроллера область поиска устанавливается в обоих случаях следующим образом: f t = [4.20-6,20] Гц и ζ t = [0,02,0,12]. Следовательно, каждый человек в популяции представляет собой вектор, содержащий две переменные. Наконец, размер популяции и максимальное количество поколений или итераций устанавливаются равными 50. Дизайн каждого сценария описывается в следующих подразделах.
TVA Без HSI
В данном случае указанная оптимизационная задача определяется следующим образом:
minftζt | GCL, T | ∞∀ω. (25)
После выполнения оптимизации с использованием указанных ранее данных, полученные параметры для TVA равны f t = 5.11 Гц, а ζ t = 11,23%.
TVA с HSI
Задача оптимизации для этого сценария —
minftζt | GHCL, T | ∞∀ω. (26)
Результирующие параметры TVA: f t = 5,13 Гц и ζ t = 11,94% после завершения соответствующей процедуры расчета.
TVA Performance
Величина TF G S (уравнение.2), GH (уравнение 8), G CL, T (уравнение 13) и GH CL, T (уравнение 15) показаны на рисунке 8A. Из этого графика получается, что норма H ∞ для неконтролируемого случая уменьшается на 26%, если учитывать HSI. Это означает, что HSI играет важную роль в динамической реакции установки, учитывая, что норма H ∞ норма представляет максимальную амплитуду абсолютного значения TF и обычно используется для оценки вибрационных характеристик контроллеров для конструкций. подвергается гармоническим возбуждениям.Уменьшение нормы косвенно показывает, что вибрация конструкции снижается, если рассматривать явление взаимодействия. Что касается TF на внерезонансных частотах, можно заметить, что модель без HSI имеет более низкие значения, чем система с HSI.
Рисунок 8. Характеристики TV A: (A) Величины TF для номинальных значений и (B) кривые CDF из-за неопределенностей в системах.
На рисунке 8A также изображено, что номинальные системы работают совершенно аналогично с включением разработанных TVA независимо от явления взаимодействия.Когда учитываются неопределенности в динамических параметрах конструкции и человеческого тела, наблюдаются заметные различия между контролируемыми результатами, как показано на рисунке 8B. На этом графике представлены кривые CDF (кумулятивная функция распределения) нормы H ∞ для набора из 1000 стохастических выборок.
Сначала сравниваются максимальные значения нормы H ∞ , полученные для обеих контролируемых систем (G ^ CL, T и GH ^ CL, T).Максимальное значение нормы H ∞ , когда рассматривается HSI, уменьшается на 40%, поэтому влияние HSI может быть чрезвычайно важным при оценке работоспособности конструкции при вибрации. Чтобы оценить сокращение для набора выборок, вычисляется среднее значение вычисленного сокращения для каждой стохастической системы. Таким образом, используется следующее выражение
Reduction11000∑n = 11000 (UncontrolledH ∞-ControlledH∞UncontrolledH∞ ) п, (27)
с n = 1, 2, ⋯ 1000.CL, T). Это указывает на то, что включение TVA более важно, если пренебречь явлением взаимодействия. Однако на рисунке 8B можно увидеть, что HSI помогает еще больше смягчить реакцию исследуемого легкого гибкого пешеходного моста FRP.
AVA Дизайн
Далее рассматриваются четыре различных случая для разработки системы AVA, и для всех них применяется следующая процедура: (i) метод корневого годографа используется для иллюстрации свойств устойчивости замкнутой системы G C L как функция регулирующего усиления K v , (ii) даны рекомендации по выбору значения K v (проблема конструкции контроллера) и ( iii) изображены результирующие TF.Кроме того, для моделирования используются следующие параметры привода испытательной массы: K e = 160 Н / В, м a = 30,4 кг, f a = 2,5 Гц и ζ a = 0,35. Они соответствуют электродинамическому шейкеру APS 400 (APS, 2013).
Идеальный привод без HSI
В этом случае не учитываются жесткость и демпфирование привода, а также внутренняя электрическая динамика (случай идеального управления).Следовательно, привод TF дает идеальный привод: G A ( s ) = K e . Кроме того, ASI и HSI также не учитываются, G A I ( s ) = 0 (см. Рисунок 3B).
На рис. 9А показан корневой годограф образовавшейся системы. На этой диаграмме показано расположение полюсов в комплексной плоскости (определяемой собственной частотой и коэффициентом демпфирования) замкнутой системы, когда коэффициент усиления управления K v изменяется от нуля до бесконечности.Как можно понять, система имеет две ветви, начинающиеся на полюсах разомкнутой системы (s1,2 = -ωsζs ± jωs1-ζs2). Один из них стремится к одному нулю в начале координат, а другой — к одному нулю в бесконечности. Действительная часть корней системы остается отрицательной для всех значений K v . Таким образом, система безусловно устойчива. Более того, демпфирование замкнутой системы увеличивается при увеличении значений K v .
Рис. 9. AVA без HSI и ASI: (A) Корневой массив идеального привода, (B) TF идеального привода для двух усилений управления ( K v = 10 и K v = 150), (C) Root locus реального исполнительного механизма и (D) TF реального исполнительного механизма. Обозначения: (×) полюс, (o) ноль.
Поскольку замкнутая система безусловно устойчива, диаграмма корневого годографа не обеспечивает прямой критерий для выбора значения усиления управления.Следовательно, при выборе K v необходимо учитывать рабочий диапазон привода с испытательной массой. Этот рабочий диапазон определяется пределами кинематических характеристик, то есть максимально достижимым смещением (ходом), скоростью и ускорением движущейся массы, а также пределом динамических характеристик, то есть максимально достижимой силой привода. Исследование максимально требуемых характеристик должно проводиться с учетом фактической силы, действующей на конструкцию, и налагаемых на нее эксплуатационных ограничений.
На рис. 9B показана величина TF, соответствующая структуре, G S , и замкнутой системе для идеального привода (случай 1), G CL1 , с двумя элементами управления прирост: K v = 10 и K v = 150. Последнее значение было выбрано в соответствии с анализом, проведенным в разделе «Настоящий привод без HIS».
Настоящий привод без HSI
В этом случае учитываются жесткость и демпфирование привода, поэтому привод TF показан в уравнении.19. Поскольку ASI игнорируется, считается, что движение конструкции незначительно по сравнению с движением привода. Как и в предыдущем случае, HSI также не учитывается.
На рис. 9С показан корневой годограф результирующей системы. В этом случае система представляет собой четыре ветви, соответствующие четырем полюсам системы. Первые два соответствуют полюсам конструкции, упомянутым в предыдущем случае, двум полюсам с низким демпфированием. Другая пара связана с динамикой механической системы исполнительного механизма и проходит через правую полуплоскость для увеличения значений K_v .Это, в свою очередь, соответствует уменьшению демпфирования, связанного с этой парой полюсов. Следовательно, результирующая система является условно устойчивой, и существует предельное значение для усиления управления, при превышении которого система становится нестабильной. То есть реальная часть полюсов актуатора становится положительной. Для исследуемого случая это предельное усиление составляет K v, lim 195.
Практическим критерием выбора коэффициента усиления является фиксация желаемого демпфирования для подсистемы привода в замкнутом контуре, чтобы его смещение оставалось в допустимых пределах (Díaz and Reynolds, 2009), избегая насыщения хода.В этом случае было выбрано K v , чтобы обеспечить демпфирование привода 5% ( K v = 150). На рисунке 9D показана величина TF, соответствующая структуре, G s , и замкнутой системе (случай 2), G CL2 , с коэффициентом усиления K . v = 150. Отклик системы несколько ниже на резонансной частоте конструкции по сравнению с предыдущим случаем (рис. 9B) и имеет пик около резонансной частоты исполнительного механизма.Первое обстоятельство связано с демпфирующим эффектом, оказываемым системой актуатора на исходную конструкцию, в то время как второе связано с динамикой привода и усилением управления. Фактически, как показано на рисунке 9C, демпфирование, связанное с полюсами привода, уменьшается с увеличением значений K, v , с последующим увеличением соответствующего пика. Следовательно, выбор значения усиления управления должен представлять собой компромисс между общим структурным демпфированием и точным откликом на резонансной частоте, связанной с приводом.
Настоящий привод без HSI и с ASI
В этом случае HSI опускается, но учитывается полный ASI (см. Уравнение 22). На рис. 10А показан корневой локус получившейся системы. Как и в предыдущем случае, в системе представлены четыре ветви. Первая пара соответствует полюсам конструкции. Однако первая ветвь стремится к нулю, расположенному на действительной отрицательной оси (а не в начале координат). Вторая пара соответствует механической системе привода и, как показано ранее, входит в правую полуплоскость, что приводит к нестабильности системы от определенных значений K v on.Тем не менее, в этом случае экскурс в правую полуплоскость имеет место для более высоких значений K v , что приводит к увеличению запаса устойчивости по сравнению с предыдущим случаем. В этом случае теоретическое предельное значение усиления управления (при превышении которого система становится нестабильной) составляет K v, lim ≈ 250. Предполагаемое значение усиления управления составляет K v = 113, что был рассчитан для обеспечения 5% коэффициента демпфирования привода во время работы.
Рис. 10. AVA с ASI: (A) Корневой геометрический путь реального привода без HSI, (B) TF реального привода без HSI, (C) Корневой участок реального привода с HSI , и (D) TF реального привода с HSI. Обозначения: (×) полюс, (o) ноль.
На рисунке 10B показана величина TF, соответствующих структуре G s и замкнутой системе G CL3 с выбранным коэффициентом усиления.Достигнутый отклик по сравнению с предыдущим случаем ниже на резонансной частоте конструкции и на резонансе, соответствующем системе исполнительного механизма. Первый стабилизирующий эффект можно рассматривать как аналог демпфирующего эффекта из-за ранее описанного HSI. Объяснение последнего эффекта было дано в предыдущем подразделе. К нему нужно относиться осторожно, так как это может привести к более высокому отклику, чем неконтролируемая структура для определенных (низких) частот.
Настоящий привод с HSI и ASI
В этом случае рассматривается реальный привод по HSI и ASI (см. Уравнение 23). На рисунке 10C показан корневой локус получившейся системы. Схема похожа на схему, показанную на рисунке 10А, с той разницей, что появляются две новые ветви, соответствующие человеко-механической системе. Точно так же, как и в предыдущем случае, ветви корневого годографа, соответствующие актуатору, входят в правую полуплоскость, что приводит к нестабильности системы от определенных значений K_v и далее.Опять же, отклонение в правую полуплоскость происходит при более высоких значениях K_v , что приводит к увеличению запаса устойчивости по сравнению с предыдущим случаем. В этом случае теоретическое предельное значение усиления управления, при превышении которого система становится нестабильной, составляет K v, lim 295, а выбранный коэффициент усиления составляет K v 59 для обеспечения демпфирования. коэффициент актуаторной системы 5%. Как можно понять, значение усиления для достижения постоянного демпфирования уменьшилось по мере учета явления взаимодействия.
На рисунке 10D показаны TF, соответствующие структуре G_S и полной системе с обратной связью G H C L 4 , с выбранным усилением управления. Отклик, достигаемый для G H C L , ухудшился по сравнению с предыдущими случаями, поскольку привод оказывает меньшую демпфирующую силу из-за более низкого усиления управления. Кроме того, определенное усиление происходит на низких частотах из-за модифицирующего эффекта G_H в окружении резонансной частоты человека.
AVA Производительность
На рисунке 11A собраны TF систем G S (см. Уравнение 2), GH (см. Уравнение 8), G CL (см. Уравнение 22) и GH CL (см. Уравнение 23). Коэффициент усиления управления, принятый для G CL , составляет 113 (раздел «Реальный привод без HSI и с ASI»), тогда как он составляет 59 для GH CL (Раздел «Настоящий привод с HSI и ASI»). »).
Рисунок 11. Характеристики AVA: (A) TF для номинальных значений и (B) кривые CDF из-за неопределенностей в системах.
На рисунке 11B показаны CDF для различных систем (неконтролируемых и контролируемых) с неопределенностями. Общее сокращение норм H ∞ для набора стохастических выборок получается, как описано в Подразделе «Характеристики TVA» (см. Уравнение 27). Расчетное среднее снижение составляет 91% без HSI и 78% с HSI.Система CL, 4 случая из 1000 представляют значения выше 0,053, что является максимальной нормой H ∞ для неконтролируемого случая. Кроме того, из функций CDF может показаться, что AVA устойчива к системным неопределенностям, поскольку достигает аналогичных сокращений независимо от стохастического случая.
Наконец, значения уменьшения, полученные для различных систем, включая TVA (см. Раздел «Характеристики TVA») и AVA, собраны в таблице 2.Включение последнего в исследуемый пешеходный мост из FRP приводит к гораздо большему общему снижению нормы H ∞ .
Таблица 2. Уменьшение нормы H ∞ с учетом неопределенностей.
Обсуждение
В этом разделе изучается еще один лабораторный пешеходный мост из FRP, чтобы обсудить значение HSI в конструкции инерционных контроллеров. Растение, описанное Russell et al. (2019), представляет собой пешеходно-живую конструкцию, динамические свойства которой для первых трех форм колебаний (собственные частоты ниже 10 Гц) представлены в таблице 3.Для процедуры проектирования пассивных и активных контроллеров (см. Раздел «Проектирование контроллеров»), 1-й режим вибрации предназначен для управления, и 1 человек, подпрыгивающий в середине пролета, считается человеческой нагрузкой.
Таблица 3. Динамические свойства первых трех режимов вибрации лабораторного пешеходного моста из стеклопластика (Russell et al., 2019).
Следуя уравнениям. 25 и 26, система TVA предназначена для управления чрезмерными вибрациями установки без учета HSI.В результате параметры контроллера: f t = 2,48 Гц, и ζ t = 11,97% при пренебрежении HSI. Тогда как f t = 2,55 Гц и ζ t = 11,92 являются расчетными значениями пассивного устройства с учетом явления взаимодействия. В обоих случаях м т = 30,4 кг, как описано в разделе «Проектирование TVA».
Для оценки характеристик спроектированных TVA, без и с HSI, считается, что первые три режима вибрации ( N s = 3) возбуждаются человеческой нагрузкой.Также предполагается, что два человека подпрыгивают синхронно в середине пролета ( N p = 2). На Фигуре 12A представлена временная диаграмма ускорения неконтролируемой установки без учета HSI. Для модели G s максимальный отклик составляет 32,81 м / с 2 , а максимальный результат составляет 3,50 м / с 2 для модели GH . Как и ожидалось, динамическая реакция растения нереальна, если не учитывать свойства человеческого тела.
Рисунок 12. Временная диаграмма реакции ускорения из-за того, что два человека подпрыгивают без HSI и с ним: (A) Неконтролируемая установка, (B) установка с системой TVA и (C) установка с AVA система.
На рисунке 12B показана реакция на ускорение связанных систем: G CL, T (см. Уравнение 13) и GH CL, T (см. Уравнение 14). В обеих моделях пиковый отклик уменьшается с включением TVA.В установившемся режиме реакции большее снижение пикового ускорения (5,38 м / с 2 ) достигается, когда HSI не учитывается (около 84%). Однако исключение явления взаимодействия приводит к завышению максимального ускорения более чем в два раза по сравнению с реальным значением (2,65 м / с 2 ), которое дает система, связанная с человеком-структурой-контроллером.
Система AVA была разработана для случаев, учитывающих и игнорирующих HSI, в соответствии с процедурой корневого локуса, описанной в разделах «Реальный привод без HSI и с ASI» и «Настоящий привод с HSI и ASI» соответственно.Следовательно, коэффициенты усиления управления были выбраны для достижения коэффициента демпфирования полюсов, соответствующего приводу с испытательной массой, около 5%. Прирост контрольного значения, выбранный для обоих случаев, составляет K v , n o h s i = 43 Vs / m и K v , h s i = 20. Рабочие характеристики системы AVA оценивались таким же образом, как описано выше для TVA: три режима вибрации и два человека, синхронно подпрыгивающие в середине пролета конструкции.
На рисунке 12С показана реакция на ускорение систем G CL (см. Уравнение 22) и GH CL (см. Уравнение 23). Когда явление HSI не учитывается, в установившемся режиме достигается пиковая характеристика 1,91 м / с 2 , что соответствует снижению приблизительно на 94%. С другой стороны, когда рассматривается HSI, пиковая характеристика составляет 1,97 м / с 2 , что подразумевает снижение на 44% по сравнению с неконтролируемым случаем, учитывающим явление HSI.
Заключение и перспективы на будущее
В этой статье используется модель сопряженной структуры человека, которая удобна для практических приложений, и теоретически и численно исследуются явления взаимодействия (в частотной области), представленные при контроле антропогенной вибрации в очень легких конструкциях. Таким образом, инерционные пассивные (TVA) и активные (AVA) стратегии были изучены без учета HSI и ASI, применяемых к легким пешеходным мостам, полностью изготовленным из стеклопластика.Детерминированный и стохастический анализы были выполнены для того, чтобы сделать общие выводы о характеристиках управления в условиях неопределенности.
Из анализа неконтролируемой структуры без HSI и с HSI общее снижение почти на 50% достигается для структур с разомкнутым контуром с учетом HSI. Этот момент может иметь большое значение при оценке работоспособности при вибрации.
Что касается TVA, расчетные параметры (полученные в результате оптимизации H ∞ нормы замкнутого контура TF) схожи с учетом или без учета HSI для структуры, изучаемой в этой статье (в которой человеческая и структурная динамика хорошо разделены).Кроме того, общее сокращение для случая с HSI выше, чем полученное без учета HSI. Интересно отметить, что коэффициент динамического усиления вне резонанса немного выше, если рассматривать HSI как структуру в руках.
Относительно AVA можно сделать следующие выводы:
• Когда используется идеальный привод, система безоговорочно устойчива, и коэффициент усиления можно увеличивать бесконечно, и чем выше коэффициент усиления, тем выше достигается демпфирование конструкции.Однако, когда учитываются динамика исполнительного механизма и / или явления взаимодействия, система больше не является безусловно устойчивой. Следовательно, необходимо тщательно выбирать коэффициент усиления, чтобы гарантировать стабильность системы и избежать насыщения привода.
• При использовании того же правила выбора усиления управления (сохранение значения демпфирования привода), усиление управления уменьшается по мере учета динамики привода, HSI и / или ASI. Следовательно, производительность AVA ухудшается при резонансе конструкции.
• Выбор коэффициента усиления представляет собой компромисс между снижением регулирования при резонансе конструкции и динамическим усилением при резонансе исполнительного механизма.
Подводя итог, в этой статье установлена общая стратегия управления, включая явления взаимодействия, для управления антропогенной вибрацией легких конструкций. Несомненно, в документе представлена структура частотной области, которая будет использоваться проектировщиками при интеграции устройств контроля вибрации в легкие пешеходные конструкции, подверженные явлениям взаимодействия.
В ходе предстоящих работ будет рассмотрен полный анализ чувствительности для ряда многомодовых структур, включая структурные и человеческие неопределенности. Эти неопределенности могут повлиять на производительность контроллера, разработанного для номинальной станции, поэтому необходимо изучить случаи, связанные с этой проблемой.
Заявление о доступности данныхНеобработанные данные, подтверждающие выводы этой статьи, будут предоставлены авторами без излишних оговорок.
Авторские взносы
ID: управление проектом, получение финансирования, надзор, концептуализация, методология, исследование и написание — обзор.CG: расследование, программное обеспечение (часть пассивного контроля), проверка и написание — подготовка первоначального проекта. JR: расследование, программное обеспечение (активная контрольная часть), проверка и написание — подготовка первоначального проекта. CR: исследование, концептуализация и написание — обзор. Все авторы внесли свой вклад в статью и одобрили представленную версию.
Финансирование
Это исследование было поддержано исследовательским проектом SEED-SD RTI2018-099639-B-I00 Министерства науки, инноваций и университетов (правительство Испании).
Конфликт интересов
Авторы заявляют, что исследование проводилось при отсутствии каких-либо коммерческих или финансовых отношений, которые могут быть истолкованы как потенциальный конфликт интересов.
Благодарности
Авторы выражают признательность Министерству науки, инноваций и университетов Испании за финансовую поддержку в рамках проекта «Повышение структурной эффективности мостов, подверженных динамической нагрузке: интегрированные интеллектуальные амортизаторы.CG выражает благодарность Секретариату высшего образования, науки, технологий и инноваций Эквадора (SENESCYT) за стипендию PhD CZ02-000167-2018. CR благодарит Мадридский политехнический университет за финансовую поддержку в виде гранта на докторскую диссертацию.
Список литературы
Ахмади, Э., Капрани, К., Живанович, С., и Хайдарпур, А. (2019). Оценка взаимодействия человека и конструкции на оживленном, легком пешеходном мостике из стеклопластика. Eng. Struct. , 199: 109687. DOI: 10.1016 / j.engstruct.2019.109687
CrossRef Полный текст | Google Scholar
APS. (2013). APS 400 ELECTRO-SEIS§– длинноходный шейкер с шарикоподшипниками для линейного перемещения. Сан-Хуан-Капистрано, Калифорния: APS Dynamics Inc.
Google Scholar
Ascione, L., Caron, J.-F., Godonou, P., van IJselmuijden, K., Knippers, J., Mottram, T., et al. (2016). Prospect for New Guidance in the Design of FRP, Report number: EUR 27666 EN. Ispra: Бюро публикаций Европейского Союза, DOI: 10.2788/22306
CrossRef Полный текст | Google Scholar
Блейхер А., Шлайх М., Фуджино Ю. и Шауэр Т. (2011). Конструкция на основе модели и экспериментальная проверка активного контроля вибрации для натяжного ленточного моста с использованием пневматических мышечных приводов. Eng. Struct. 33, 2237–2247. DOI: 10.1016 / j.engstruct.2011.02.035
CrossRef Полный текст | Google Scholar
Бонифаций В., Буй В., Брессолетт П., Чарльз П. и Сеспедес X. (2006). Пешеходные мосты: Оценка вибрационного поведения пешеходных мостов. Paris: Service d’Études Techniques des Routes et Autoroutes, doi: 10.1051 / matecconf / 201821110002
CrossRef Полный текст | Google Scholar
Каэтано, Э., Кунья, Б, Моутинью, К., и Магальяйнс, Ф. (2010). Исследования по контролю антропогенной вибрации пешеходного моста Педро-э-Инеш, Португалия. Часть 2: реализация настроенных массовых демпферов. Eng. Struct. 32, 1082–1091. DOI: 10.1016 / j.engstruct.2009.12.033
CrossRef Полный текст | Google Scholar
Касадо, К.М., Диас, И. М., де Себастьян, Дж., Понсела, А. В., и Лоренцана, А. (2013). Реализация пассивного и активного контроля вибрации на действующем пешеходном мостике. Struct. Контрольное исцеление. Монит. 20, 70–87. DOI: 10.1002 / stc.471
CrossRef Полный текст | Google Scholar
Кашати, Ф., Кашати, С., и Фаравелли, Л. (2017). Вклад в моделирование индуцированного человеком возбуждения на пешеходных мостах. Struct. Saf. 66, 51–61. DOI: 10.1016 / j.strusafe.2017.01.004
CrossRef Полный текст | Google Scholar
CEN. (2020). prEN 1991-2: 2020: Рабочий документ: Воздействия на конструкции — Часть 2: Транспортные нагрузки на мосты. Брюссель: Европейский комитет по стандартизации.
Google Scholar
Диас И. М., Перейра Э., Хадсон М. Дж. И Рейнольдс П. (2012a). Повышение активного контроля вибрации пешеходных конструкций с помощью инерционных приводов с локальной обратной связью. Eng. Struct. 41, 157–166.DOI: 10.1016 / j.engstruct.2012.03.043
CrossRef Полный текст | Google Scholar
Диас И. М., Перейра Э. и Рейнольдс П. (2012b). Интегральная резонансная схема управления для подавления антропогенных вибраций в легких пешеходных сооружениях. Struct. Контрольное исцеление. Монит. 19, 55–69. DOI: 10.1002 / stc.423
CrossRef Полный текст | Google Scholar
Диас, И. М., и Рейнольдс, П. (2009). Надежный и насыщенный контроль антропогенных вибраций пола с помощью привода доказательства массы. Smart Mater. Struct. 18: 125024. DOI: 10.1088 / 0964-1726 / 18/12/125024
CrossRef Полный текст | Google Scholar
Дугилл, Дж. У., Райт, Дж. Р., Паркхаус, Дж. Дж., И Харрисон, Р. Э. (2006). Взаимодействие с человеческими структурами во время ритмичного покачивания. Struct. Англ. 118, 32–39.
Google Scholar
Элиас, С., Мацагар, В. (2017). Научно-исследовательские разработки в области контроля вибрации конструкций с использованием пассивных настраиваемых гасителей массы. Annu.Rev. Control 44, 129–156. DOI: 10.1016 / j.arcontrol.2017.09.015
CrossRef Полный текст | Google Scholar
Fiberline Composites A / S. (2018). Сертификат общего дизайна. Middelfart: Fiberline Composites A / S.
Google Scholar
Heinemeyer, C., Butz, C., Keil, A., Schlaich, M., and Goldack, A. (2009). Конструкция легких пешеходных мостов для искусственных вибраций. Брюссель: Европейская комиссия, DOI: 10.2788 / 33846
CrossRef Полный текст | Google Scholar
ISO.(2012). ISO 10137 – Основы проектирования конструкций – Устойчивость зданий и пешеходных дорожек к вибрациям. Женева: Международная организация по стандартизации.
Google Scholar
Джонс, К. А., Рейнольдс, П., и Павич, А. (2011). Вибрационная работоспособность конструкций стадионов при динамических массовых нагрузках: обзор литературы. J. Sound Vib. 330, 1531–1566. DOI: 10.1016 / j.jsv.2010.10.032
CrossRef Полный текст | Google Scholar
Mao, Q., и Хуанг, С. (2019). Создание настраиваемого гасителя вибрации с использованием инерционного исполнительного механизма с обратной связью по ускорению испытательной массы. Внутр. J. Struct. Stab. Дин. 19: 1950087. DOI: 10.1142 / S0219455419500871
CrossRef Полный текст | Google Scholar
Мао, К., Ли, С., и Хуанг, С. (2020). Инерционный привод с виртуальной массой для активного контроля вибрации. Внутр. J. Acoust. Виб. 25, 445–452. DOI: 10.20855 / ijav.2020.25.31681
CrossRef Полный текст | Google Scholar
Mathworks.(2019). MATLAB – Руководство по началу работы. Matick.
Google Scholar
Мореу, Ф., Махарджан, Д., Чжу, К., и Вайкофф, Э. (2020). Мониторинг вызванных человеком вибраций пола для количественной оценки танцевальных движений: исследование взаимодействия человека и конструкции. Перед. Встроенная среда. 6:36. DOI: 10.3389 / fbuil.2020.00036
CrossRef Полный текст | Google Scholar
Моутинью, К., Кунья, А., Каэтано, Э., и де Карвалью, Дж. М. (2018). Контроль вибрации тонкого пешеходного моста с помощью пассивных и полуактивных настроенных демпферов. Struct. Контрольное исцеление. Монит. 25: e2208. DOI: 10.1002 / stc.2208
CrossRef Полный текст | Google Scholar
Preumont, A. (2002). Введение », в Управление вибрацией активных конструкций. Dordrecht: Kluwer Academic Publishers, DOI: 10.1007 / 0-306-48422-6_1
CrossRef Полный текст | Google Scholar
Рамос-Морено, К., Руис-Теран, А. М., и Стаффорд, П. Дж. (2020). Влияние стохастических представлений пешеходов на реакцию на исправность. Proc. Inst. Civ. Англ. Бридж. Англ. 1–43. doi: 10.1680 / jbren.19.00050 [Epub перед печатью].
CrossRef Полный текст | PubMed Аннотация | Google Scholar
Рассел, Дж. М., Моттрам, Дж. Т., Живанович, С., и Вей, X. (2019). «Дизайн и характеристики сделанного на заказ живого пешеходного моста из ALL-FRP», в материалах конференции Общества экспериментальной механики, серия , изд. С. Пакзад (Орландо, Флорида: Springer New York LLC), 125–128. DOI: 10.1007 / 978-3-030-12115-0_16
CrossRef Полный текст | Google Scholar
Шахабпур, Э., Павич, А., Рачич, В. (2016). Взаимодействие между идущими людьми и конструкциями в вертикальном направлении: обзор литературы. Shock Vib. 2016: 3430285. DOI: 10.1155 / 2016/3430285
CrossRef Полный текст | Google Scholar
Сильва Р., Пиментел Р. и Павич А. (2020). «Представление биодинамических моделей для представления действий пешехода в вертикальном направлении», в материалах Proceedings of the Eurodyn 2020 11th International Conference on Structural Dynamics , Athens, 1824–1834.DOI: 10.47964 / 1120.9147.19289
CrossRef Полный текст | Google Scholar
SIMULIA. (2017). Руководство пользователя по анализу Abaqus 2017. Джонстон, Иллинойс: Корпорация Dassault Systèmes Simulia.
Google Scholar
Сориа, Дж. М., Диас, И. М., и Гарсия-Паласиос, Дж. Х. (2017). Контроль вибрации пешеходного моста с изменяющимися во времени модальными параметрами: исследование полуактивных реализуемых стратегий. Smart Struct. Syst. 20, 525–537. DOI: 10.12989 / sss.2017.20.5.525
CrossRef Полный текст | Google Scholar
Стратфорд, Т. (2012). «Состояние пешеходного моста Аберфелди после 20 лет эксплуатации», в докторской диссертации , представленной на конференции Structural Faults and Repair 2012, Эдинбург.
Google Scholar
Террилл Р., Боймер Р., Ван Ниммен К., Ван ден Брок П. и Старосек У. (2020). Двойной роторный демпфер для антропогенных колебаний пешеходных мостов. J. Struct. Англ. 146: 04020119. DOI: 10.1061 / (восхождение) ул.1943-541х.0002654
PubMed Аннотация | CrossRef Полный текст | Google Scholar
Ван Ниммен, К., Ломбарт, Г., Де Рок, Г., и Ван ден Брок, П. (2017). Влияние вертикального взаимодействия человека и конструкции на реакцию пешеходных мостов на возбуждение. J. Sound Vib. 402, 104–121. DOI: 10.1016 / j.jsv.2017.05.017
CrossRef Полный текст | Google Scholar
Ван Ниммен, К., Вербеке, П., Ломберт, Г., Де Рок, Г., и Ван ден Брок, П.(2016). Численная и экспериментальная оценка динамических характеристик пешеходного моста с настроенными демпферами массы. Дж. Бридж. Англ. 21: C4016001. DOI: 10.1061 / (asce) быть.1943-5592.0000815
PubMed Аннотация | CrossRef Полный текст | Google Scholar
Ван Х., Чен Дж. И Нагаяма Т. (2019). Определение параметров модели пружина-масса-демпфер для подпрыгивания людей. J. Sound Vib. 456, 13–29. DOI: 10.1016 / j.jsv.2019.05.034
CrossRef Полный текст | Google Scholar
Ван, Ю., Браунджон, Дж., Дай, К., и Патель, М. (2019). Оценка действий пешеходов на пешеходных мостах с использованием подходов компьютерного зрения. Перед. Встроенная среда. 5: 133. DOI: 10.3389 / fbuil.2019.00133
CrossRef Полный текст | Google Scholar
Вей, X., Рассел, Дж., Живанович, С., и Тоби Моттрам, Дж. (2019). Измерены динамические свойства пешеходных мостов из стеклопластика и их критическое сравнение с конструкциями из обычных строительных материалов. Compos. Struct. 223: 110956. DOI: 10.1016 / j.compstruct.2019.110956
CrossRef Полный текст | Google Scholar
Чжан К. и Оу Дж. (2015). Моделирование и динамические характеристики системы привода электромагнитных масс для контроля вибрации конструкции. Eng. Struct. 82, 93–103. DOI: 10.1016 / j.engstruct.2014.10.029
CrossRef Полный текст | Google Scholar
Зурейк, А. Х., Беннет, Р. М., и Эллингвуд, Б. Р. (2006). Статистическая характеристика свойств армированного волокном полимерного композиционного материала для проектирования конструкций. J. Struct. Англ. 132, 1320–1327. DOI: 10.1061 / (ASCE) 0733-94452006132: 81320
CrossRef Полный текст | Google Scholar
Моделирование требований Структурированный анализ в разработке программного обеспечения
Введение
В главе 3 был рассмотрен анализ требований, и мы вкратце рассказали о важности моделирования как основного вида анализа. Существуют различные методы анализа, каждый из которых создает набор моделей. В этой главе мы рассмотрим структурированный анализ, один из первых методов, которые использовались в течение многих лет.
Рис. 1. Положение структурированного анализа в SE
Методы анализа
Основное внимание при моделировании анализа уделяется «что», а не «как». На этапе проектирования основное внимание уделяется «как».
Моделирование анализа отвечает на важные вопросы, например:
- Как субъекты взаимодействуют с системой?
- Какую информацию система потребляет и производит (ввод / вывод)?
- Какие функции выполняет система?
- Как система ведет себя в ответ на определенные события?
- С какими ограничениями работает система?
Модели анализа служат различным целям, например:
- Показать систему на разных уровнях абстракции
- Стать основным драйвером этапа проектирования
- Стать исходным элементом для получения приемочных испытаний для проверки
Всегда иметь в виду два золотых правила, которыми вы должны руководствоваться при моделировании: 1) старайтесь, чтобы модели оставались простыми, 2) любые полезные обозначения являются хорошими обозначениями.(например, если вы используете OOA & D, но обнаруживаете, что DFD {диаграмма потока данных} полезна, вы можете и должны ее использовать!)
Существуют различные методы анализа, два из наиболее часто используемых — это Structured Analysis и Object- Ориентированный анализ.
Рисунок 2 Сравнение методов анализа
Каждый метод рассматривает систему с разных точек зрения.
Структурированный анализ
Использование структурного анализа означает создание четырех моделей: данных, функциональных, информационных потоков и
поведенческих моделей.
Модель данных: Диаграмма взаимосвязей сущностей (ERD)
- Показывает объекты данных, их атрибуты и отношения между этими объектами
Функциональные модели и модели информационных потоков : Диаграмма потоков данных (DFD)
Поведенческая модель : Диаграмма перехода состояний (STD)
- Как система меняет состояние в ответ на события
В следующих пунктах мы кратко рассмотрим каждую модель и методы их создания.
Моделирование данных ERD
Целью моделирования данных является определение объектов данных, потребляемых и производимых системой, а также отношений между этими объектами.
Объект данных представляет информацию, которая понимается системой (например, «Клиент» и «Билет» являются объектами данных системы бронирования билетов), и имеет атрибуты {свойства} (например, атрибуты «Возраст» и «Пол» для « Клиент »потребляются системой && Атрибут« TotalMiles »для« Клиент »генерируется системой).Объекты данных не определяют операции! Это основное различие между объектом данных и объектом (используется в объектно-ориентированном анализе). Наконец, объекты данных имеют отношения с другими объектами данных (например, «Клиент» покупает «Билет»).
Entity Relationship Diagram (ERD) используется для моделирования объектов данных и их отношений. На рисунке 3 показан предыдущий использованный пример системы резервирования как ERD, для создания которого использовалось это видение.
Есть вещи, которые нужно знать об ERD, такие как мощность, но мы сейчас представим это в текущем изложении.
Теперь, когда у нас есть модель данных, следующий шаг — посмотреть, как данные передаются в системе и как они меняются во время потока.
Рисунок 3 ERD для системы резервирования
Информационный поток и функциональное моделирование
Сначала нам нужно поговорить о том, как различать данные и информацию. Для этого на рисунке 4 представлен пример бронирования билета.
Рис. 4 Сравнение данных с информацией
В целом можно сказать, что системы принимают данные из различных источников __ затем __à данные обрабатываются и преобразуются __ затем __à Информация передается клиентам, пользователям или другим системам.
DFD служит двум целям:
- Показывает, как объекты данных проходят через систему (модель информационного потока)
- Показывает преобразование, применяемое к этим объектам различными функциями (Функциональная модель)
DFD легко понять, поскольку обозначения состоят из простых форм. На рисунке 5 представлены некоторые из основных концепций нотации и их применение к примеру бронирования билетов.
Рис. 5 Обозначения и приложение DFD
Теперь поговорим о спецификации процесса или PSPEC.PSPEC описывает процесс на последнем уровне DFD. DFD может иметь несколько уровней, например, DFD уровня 0 будет всего лишь системным пузырем — функцией (например, в нашем случае резервирование) и связью с внешними объектами (такими как клиент и банк).
4.6 STD, CFD и CSPEC или поведенческое моделирование
Поведенческие модели показывают, как системы меняют состояние в ответ на события.
Диаграмма перехода состояний (STD) моделирует поведение системы, показывая:
- Состояния системы
- Изменения состояния в ответ на события
- Действия, которые необходимо предпринять в результате определенного события
Для того, чтобы полностью понять, что такое состояния системы, давайте рассмотрим систему бронирования билетов
Клиенты могут инициировать процесс бронирования и продолжить его позже
Подсистема уведомлений отслеживает количество оставшихся мест
Подсистема уведомлений меняет свое состояние на: много, заканчивается или заполнено
è Множество, заканчивается и заполнено — это состояния, которые указывают на поведение системы.
Диаграмма перехода состояний (STD) перемещает систему из одного из этих состояний в другое.Ярлыки в верхней части указывают «события, вызывающие изменение состояния», нижняя часть «Ответ системы при изменении».
Рисунок 6 STD для системы резервирования
Одна вещь, которую мы должны выделить здесь, это то, что STD существовал до UML , однако UML адаптировал свои собственные варианты STD. Он называет это диаграммой состояний, также называемой диаграммой состояний или диаграммой состояний.
è STD, используемый в структурированном анализе, имеет другую нотацию, чем диаграмма состояний UML
Схема потока управления (CFD) показывает поток управления вместо потока данных (DFD)
Рисунок 7 Нотация CFD и пример
Структурированный анализ Алгоритм на этапе анализа требований.
- Определите объекты данных и атрибуты на основе информации о требованиях
- Проанализируйте отношения между объектами данных с заинтересованными сторонами
- Создайте ERD
3.